Erweiterung der
Seilwinde
in der ILW Koblenz
Abschlussprojekt FSE06
Projektteam:
Christian Gödderz
Jan Schmitz
Schule:
Fachschule Elektrotechnik
Carl-Benz-Schule
Beatusstraße 143-147
56073 Koblenz
Inhaltsverzeichnis
1 Vorwort 4
2 Beschreibung des Projektes. 4
2.1
Aufgabenstellung.. 4
2.2
Ausgangslage. 5
3 Projektauftrag.. 6
4 Projektplanung und Zeiteinteilung.. 8
4.1
Allgemein.. 9
4.2 Mindmap.. 9
4.3
geplanter Zeitplan.. 10
4.4
abgeänderter durchgeführter Zeitplan.. 11
4.5
Beschreibung des Zeitplanes. 11
5 Testen der Anlage. 15
5.1
Erklärung.. 15
5.2
Ermitteln der Nennlast 16
5.3
Stromaufnahme des Motors messen.. 18
5.4
Drehzahl messen.. 20
6 Strommessung.. 23
6.1 Planung der Strommessung.. 23
6.2
Entscheidungsmatrix. 25
6.3 Das
Strommess-IC.. 25
6.4 Testen
des Strommess-IC´s. 27
6.5 Messbereichsanpassung.. 31
6.6 Blockschaltbild Stromaufnahme. 33
7 Drehzahlmessung.. 33
7.1 Planung der Drehzahlmessung.. 33
7.1.1 CNY70. 34
7.1.2
Incrementalgeber. 34
7.2
Entscheidungsmatrix. 37
7.3 Blockschaltbild Drehzahlaufnahme. 39
8 Planung der Gewichtsbestimmung.. 39
8.1
Durchführung.. 40
8.1.1 Ideen.. 40
8.1.2
Probleme beschreiben.. 41
8.1.3
Verbesserungsvorschläge. 41
9 Lagebestimmung.. 42
9.1 Planung der Lagebestimmung.. 42
9.2
Durchführung der Lagebestimmung.. 43
10 Auswahl eines Mikrocontrollers. 43
10.1 Aufbau der C-Control M-Unit 2.0. 45
10.2
Beschreibung der verwendeten Ein-/Ausgänge. 46
11 Spannungsversorung für unsere
Bauteile. 48
11.1
Spannungsversorgung herstellen.. 48
11.2
Platinenlayout 50
11.3 Stückliste.. 51
11.4
Spannungsversorgungsplatine testen.. 51
12 Planung der Projektwoche (KW 4) 54
13 Einbau der Komponenten.. 54
13.1
Blockschaltbild.. 59
14 Visualisierung.. 59
14.1
Planung der internen Visualisierung.. 59
14.1.1
Duchführung.. 60
14.2
Planung der externen Visualisierung.. 60
14.2.1
Durchfühung.. 61
15 Datenübertragung.. 61
15.1
Schnittstellenadapter. 61
15.2
Serielle Schnittstelle. 61
15.3
Ansprechen.. 62
16 Software. 63
16.1 Delphi 63
16.1.1
Problemanalyse. 63
16.1.2
Aufbau eines Lösungswegs. 64
16.1.3
Datenanalyse. 65
16.1.4
Auswahl einer Zielsprache. 66
16.1.5
Kodierung.. 66
16.1.6 Test 66
16.1.7
Dokumentation.. 66
16.2
C-Control 66
16.2.1 Allgemeines. 66
16.2.2
Verarbeitung in der C-Control 67
16.2.3
Struktogramm... 67
16.2.4
Variablentabelle. 68
16.2.5
Quelltext 69
17 Testprotokol der Erweiterungen.. 71
17.1 Testen
der Drehzahlaufnahme. 71
17.2 Testen
der Stromaufnahme. 72
17.3 Testen
der Zustandsanzeige. 72
17.4 Testen
der Lagebestimmung.. 73
17.5
VDE-Prüfung.. 73
18 Drehzahlsteller. 74
19 Projektverlauf (Fazit) 75
20 Erklärung.. 76
21 Abbildungsverzeichnis. 77
22.1
Internet 77
22.2 Bücher. 79
22.3
Sonstiges. 79
1 Vorwort
Im zweiten Jahr der
Ausbildung zum staatlich geprüften Elektrotechniker wird eine Projektarbeit
(Modul 14) durchgeführt. Diese wird von den Schülern in der Regel in Teams mit
je zwei Mann bearbeitet.
Um die Projektarbeit im
festgelegten Rahmen erfolgreich abschließen zu können stellt die Schule jede
Woche einen Projekttag zur Verfügung.
Zusätzlich werden die
Schüler für eine Projektwoche im Januar 2008 freigestellt.
Ziel des Projektes ist es,
alle Vorgaben, die im Projektauftrag niedergeschrieben sind, am Ende des
Projektes zu unserer und zur Zufriedenheit des Auftraggebers zu erfüllen.
Hierbei soll möglichst
kostengünstig und unter besonderer Berücksichtigung einer stringenten
Einhaltung der Projektplanung gearbeitet werden.
Des Weiteren sollen
Lösungswege, deren Ausführungen und die gesamte Projektplanung ausführlich
dokumentiert werden.
Bei der Projektplanung
sollte beachtet werden, dass in der Planungsphase ein Zeitplan zu erstellen ist
der den Ablauf und die Verteilungen der durchzuführenden Arbeiten auf die
einzelnen Teammitglieder widerspiegelt.
Inhaltsverzeichnis
2 Beschreibung des Projektes
2.1 Aufgabenstellung
Eine bestehende
funktionstüchtige Seilwinde der Industrielehrwerkstatt ILW Koblenz soll getestet und in sofern erweitert
werden, dass weitestgehend alle in der Technikerausbildung vermittelten
Kenntnisse in einem Teilbereich der Erweiterung wieder zu erkennen sind.
Die Erweiterungen bestehen
darin, Messwerte wie Strom ( I ) und Drehzahl ( n ) zu erfassen, digitalisieren und dann
zu visualisieren.
Außerdem soll es am Ende des
Projektes möglich sein, die momentane Lage und
die Masse der angehängten Last darzustellen.
Auch sollen Möglichkeiten
untersucht werden, bestimmte Drehzahlverläufe (Drehzahlregelung) in die
Steuerung zu implementieren.
Alle Veränderungen der
Seilwinde sowie durchgeführte Arbeiten, verwendete Bauteile und Entscheidungen
sollen in einer Projektdokumentation niedergeschrieben werden.
Außerdem wird zusätzlich
noch eine Bedienungsanleitung geschrieben, die den Umgang mit der umgebauten
Anlage erklären und gleichermaßen erleichtern soll.
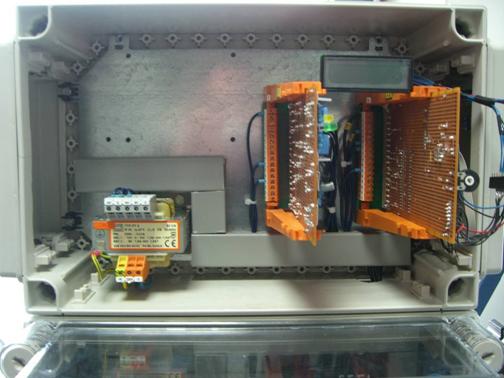
2.2 Ausgangslage
Für die zu erarbeitende
Projektarbeit im Modul 14 wird uns von der Industrielehrwerkstatt (ILW) in Koblenz eine funktionstüchtige Seilwinde
für die Dauer der Arbeiten zur Verfügung gestellt.
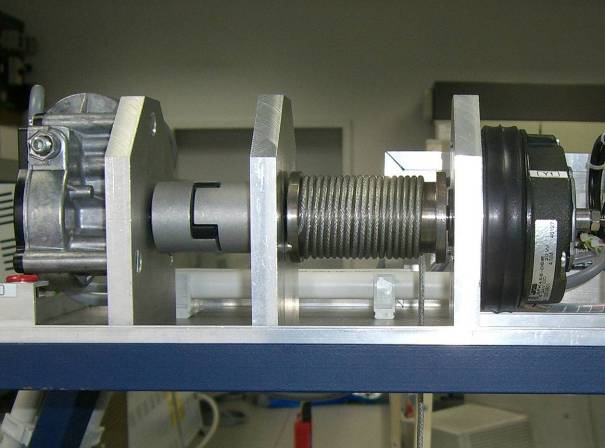
Die Seilwinde ist in einer
Höhe von 140,5cm auf einer Unterkonstruktion positioniert. Sie besteht aus
einem Gleichstrommotor, einer daran befestigten Welle
und einer mechanischen Bremse, die die Last in einer Position hält und somit
vor dem herunterfallen schützt.
Mit einem Handschaltgerät
kann eine an der Seilwinde befestigte Masse auf- und abgefahren werden.
Die Ansteuerung geschieht
über eine Siemens Logo.
Außerdem ist je ein
Not-Aus-Schalter an der Anlage und an dem Handschaltgerät angebracht.
Auf zwei Analogmesswerken
die im Schaltkasten integriert sind, kann man Motorstrom und Spannung ablesen.
3 Projektauftrag
|
Projektauftrag / Projektname:
Erweiterung
einer Seilwinde
|
Projekt-Code
|
|
Projektleiter:
Christian Gödderz
Jan
Schmitz
|
Projektteam:
Christian Gödderz
Jan
Schmitz
|
|
Zielsetzung:
Alle
Vorgaben, die im Projektauftrag niedergeschrieben sind, sollen am Ende des
Projektes zu unserer und zur Zufriedenheit des Auftraggebers erfüllt worden
sein.
Hierbei
soll möglichst kostengünstig und unter besonderer Berücksichtigung einer
stringenten Einhaltung der Projektplanung gearbeitet werden.
|
|
Aufgabenstellung:
Eine
bestehende funktionstüchtige Seilwinde soll auf ihre Grenzwerte getestet werden
und in sofern erweitert werden, dass weitestgehend alle in der
Technikerausbildung vermittelten Kenntnisse in einem Teilbereich der
Erweiterung wieder zu erkennen sind.
Die
Erweiterungen bestehen darin, Messwerte wie Strom und Drehzahl zu erfassen, zu
digitalisieren und dann zu visualisieren.
Des
Weiteren soll es am Ende des Projektes möglich sein, die momentane Lage und
das Gewicht der angehängten Last darzustellen.
Außerdem
sollen Möglichkeiten untersucht werden bestimmte Drehzahlverläufe (Rampenverläufe,
Drehzahlregelung) in die Steuerung zu implementieren.
|
|
|
|
|
Zu erarbeitende Ergebnisse:
-
Grenzwerte testen
-
angehängtes Gewicht bestimmen
-
Messwerte (Strom, Drehzahl, etc.) Erfassen und Visualisieren
-
die momentane Lage des Gewichtes bestimmen und visualisieren
-
Drehzahlregelung planen
-
eine ausführliche Dokumentation erstellen
|
|
Budget:
|
Projektbeginn:
04.02.2008
|
Projektende:
04.04.2008
|
|
Randbedingungen:
-
Werkzeug
-
Computer
-
Raum
|
|
Termine, Meilensteine:
1 KW36
Projektumfang geklärt
2 KW41 alle
Grenzwerte getestet/gemessen
3 KW52 Planungen
abgeschlossen
4 KW4 Einbau der Komponenten abgeschlossen
5 KW8 Mikrocontroller programmiert
6 KW10 externe
Visualisierung programmiert
7 KW13 Arbeiten
abgeschlossen
8 KW13
Projektdokumentation fertig gestellt
9 KW14
Dokumentation abgegeben
|
|
Auftraggeber: Projektleiter:
________________ ___________________
|
Inhaltsverzeichnis
4 Projektplanung und Zeiteinteilung
4.1 Allgemein
Nachdem
der Umfang des Projektes geklärt war und im Projektauftrag niedergeschrieben werden
konnte, begannen wir damit unsere Aufgabenstellung mittels einer Mindmap in einzelne Aufgabengebiete bzw. Einheiten zu
gliedern und somit auch schon mögliche Lösungswege zu erarbeiten.
Mit
Hilfe dieser Methode konnten wir den ungefähren Umfang unseres Projektes
abschätzen und dann einen Zeitplan erstellen.
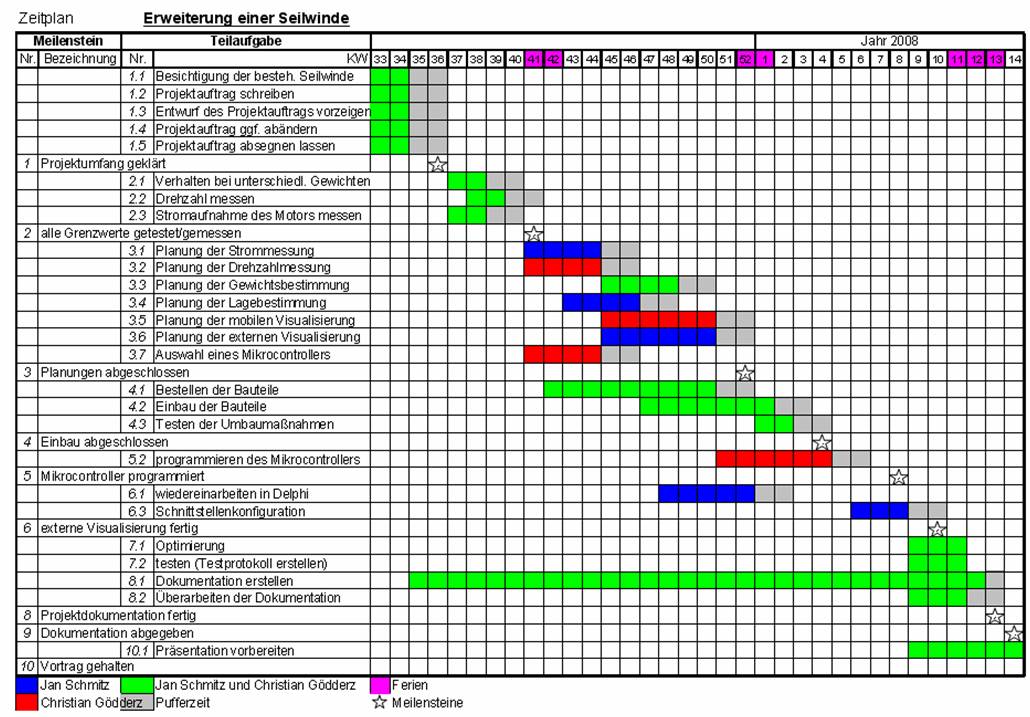
In dem Zeitplan sind neben den einzelnen zu erarbeitenden Schritten auch die zu
erreichenden Meilensteine dargestellt. Diese sind notwendig, um zur nächsten
Stufe im Projekt vorzudringen. Außerdem ist hier zu erkennen welche
Aufgabengebiete von welchem Teammitglied bearbeitet werden.
Nachdem
diese Einteilung festgelegt wurde, schrieben wir zu jedem im Zeitplan
aufgelisteten Punkt eine kurze Erklärung, welche verdeutlichen soll, was in dem
jeweiligen Punkt zu tun ist.
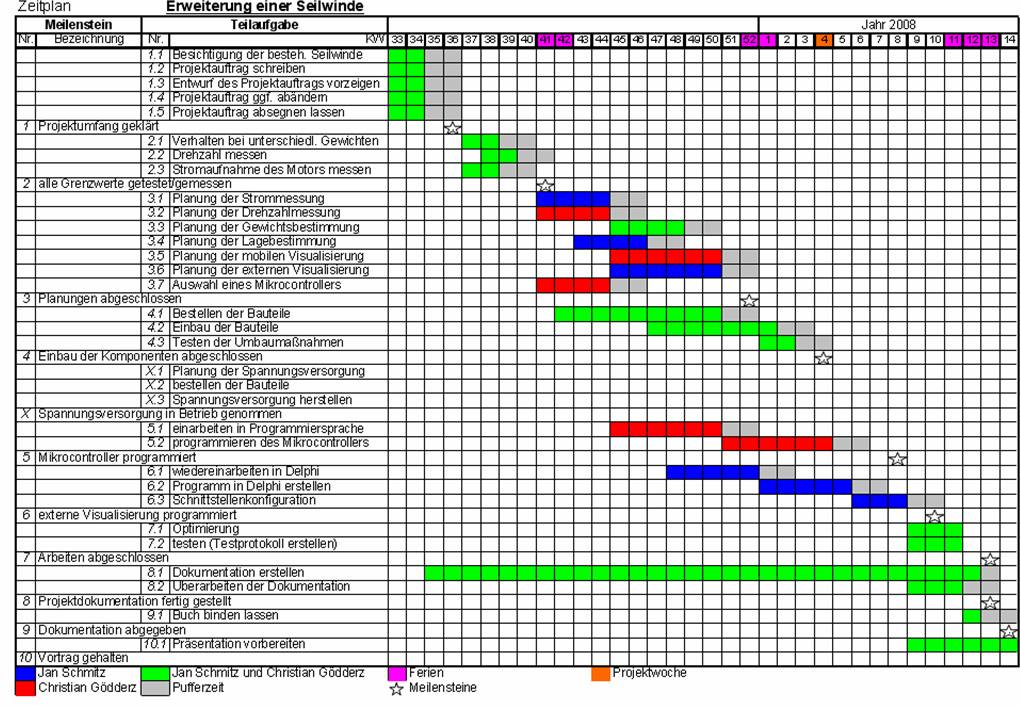
Durch
vor dem Projekt nicht zu erwartende Umstände, die erst während des Projektes zu
erkennen waren, mussten jedoch einige Dinge am ursprünglich vorgesehenen Zeitplan
verändert, bzw. ergänzt werden. Diese Änderungen sind farblich im „abgeänderten
durchgeführten Zeitplan“ gekennzeichnet.
4.2 Mindmap
4.3 geplanter Zeitplan
Inhaltsverzeichnis
4.4 abgeänderter durchgeführter
Zeitplan
4.5 Beschreibung des Zeitplanes
1.1Besichtigung der bestehenden Seilwinde
bei der ILW
Hierbei wird
eine nähere Beobachtung der Funktionsfähigkeit und Vollständigkeit der
Seilwinde zu Beginn des Projektes durchgeführt. Im Grunde wird sich ein Bild
von der Gesamtsituation gemacht. (Bilder machen)
1.2 Projektauftrag schreiben
Ausfüllen des
uns von der Schule zur Verfügung gestellten Formulars.
1.3 Entwurf des Projektauftrags vorzeigen
Vorzeigen des
ausgefüllten Formulars bei Herr Kinne, Herr Euteneuer oder Herr Ludwig und
abklären in wiefern Änderungen durchgeführt werden sollten.
1.4 Projektauftrag ggf. abändern
Mit dem Lehrer
abgesprochene Veränderungen im Projektauftrag vornehmen.
1.5 Projektauftrag vorzeigen und absegnen
lassen
Erneutes
vorzeigen der überarbeiteten Version des Projektauftrags und die Zustimmung des
Lehrers einholen.
2.1 Verhalten der Anlage bei
unterschiedlichen Gewichten
Nenndaten aus
den Datenblättern der eingebauten Bauteile entnehmen und unter Berücksichtigung
dieser Daten bestimmte Testszenarien durchführen.
Hierbei werden
verschiedene Gewichte angehängt und dabei das Verhalten der Anlage beobachtet
und dokumentiert.
2.2 Drehzahl messen
Es wird die
Drehzahl in Abhängigkeit des angehängten Gewichtes untersucht.
(Kennlinienaufnahme)
Aufgrund dieser
Untersuchungen werden Randbedingungen festgelegt, die zur späteren Auswahl der
Bauteile, die bei den Erweiterungs- bzw. Veränderungsmaßnahmen eingesetzt
werden, notwendig sind.
2.3 Stromaufnahme des Motors messen
Es wird die
Stromaufnahme in Abhängigkeit des angehängten Gewichtes untersucht
(Kennlinienaufnahme)
Aufgrund dieser
Untersuchungen werden Randbedingungen festgelegt, die zur späteren Auswahl der
Bauteile, die bei den Erweiterungs- bzw. Veränderungsmaßnahmen eingesetzt
werden, notwendig sind.
3.1 Planung der Strommessung
Vorgehensweise
unter Berücksichtigung der Randbedingungen planen und die benötigten
Komponenten festlegen. Hierbei wird der Markt auf kostengünstige und für uns
technisch ausreichende Produkte und ihre Alternativen untersucht.
3.2 Planung der Drehzahlmessung
Vorgehensweise
unter Berücksichtigung der Randbedingungen planen und die benötigten
Komponenten festlegen. Hierbei wird der Markt auf kostengünstige und für uns
technisch ausreichende Produkte und ihre Alternativen untersucht.
3.3 Planung der Gewichtsbestimmung
Vorgehensweise
unter Berücksichtigung der Randbedingungen planen und die benötigten
Komponenten festlegen. Hierbei wird der Markt auf kostengünstige und für uns
technisch ausreichende Produkte und ihre Alternativen untersucht.
3.4 Planung der Lagebestimmung
Vorgehensweise
unter Berücksichtigung der Randbedingungen planen und die benötigten
Komponenten festlegen. Hierbei wird der Markt auf kostengünstige und für uns
technisch ausreichende Produkte und ihre Alternativen untersucht.
3.5 Planung der mobilen Visualisierung
Vorgehensweise
unter Berücksichtigung der Randbedingungen planen und die benötigten
Komponenten festlegen. Hierbei wird der Markt auf kostengünstige und für uns
technisch ausreichende Produkte und ihre Alternativen untersucht.
3.6 Planung der externen Visualisierung
Graphische
Planung der Bedieneroberfläche
3.7 Auswahl eines Mikrocontollers
Hierbei wird der
Markt auf kostengünstige und für uns technisch ausreichende
Produkte und
ihre Alternativen untersucht.
X.1 Planung der Spannungsversorgung
Alle benötigten
Spannungen für unsere unter Punkt 3 ausgewählten Bauteile ermitteln und einen
Entwurf für die benötigte Spannungsversorgung der Erweiterungen anfertigen.
X.2 Bestellen der Bauteile
Hierbei werden
Lieferanfragen gestellt und eventuell bei nicht vorrätiger Ware in Abstimmung
mit unserem Zeitplan Alternativen gesucht.
X.3 Spannungsversorgung herstellen
Hierbei wird eine
Spannungsversorgungsplatine angefertigt die uns alle benötigten Spannungen
liefert.
4.1 Bestellen der Bauteile
Hierbei werden
Lieferanfragen gestellt und eventuell bei nicht vorrätiger Ware in Abstimmung
mit unserem Zeitplan Alternativen gesucht.
4.2 Einbau der Bauteile
Testen der Bauteile auf ihre Funktionsfähigkeit und
Einbau an den vorgesehenen Stellen.
4.3 Testen der Umbaumaßnahmen
Eingeschränkter
Funktionstest > Probelauf der gesamten Hardware auf ihre neuen Funktionen
5.1 Einarbeiten in Programmiersprache
Programmiersprache
auswählen, Einarbeitung, Planung der Funktion und Möglichkeiten mit diesem Tool
5.2 Programmieren des
Mikrocontrollers
Ein Programm
erstellen, das die von uns geforderten Aufgaben an den Mikrocontroller erfüllt.
6.1 wiedereinarbeiten in Delphi
Einarbeitung in
Programmiersprache, Planung der Funktion und Möglichkeiten mit diesem Tool
durchführen.
6.2 Programm in Delphi erstellen
Ein Programm
erstellen, das die von uns geforderten graphischen
Anforderungen an die Bedieneroberfläche erfüllt.
6.3 Schnittstellenkonfiguration
Anbinden der
Anlage über eine Schnittstelle an den zur externen Visualisierung vorgesehenen
Computer.
7.1 Optimierung
Anlage
optimieren, d.h. alle Einstellungen überprüfen und ggf. nachstellen und auf
Anwenderfehler testen
7.2 Testen (Testprotokoll erstellen)
Hierbei wird ein
Testprotokoll erstellt mit dem durch verschiedene Testszenarien Fehlerquellen
ausgeschlossen werden können.
In diesem werden
unsere Ergebnisse und Schlüsse dokumentiert.
8.1 Dokumentation erstellen
Während der
gesamten Dauer des Projektes sollen alle Schritte und Vorgehensweisen
ausführlich dokumentiert werden.
Hierbei ist zu
beachten dass Vergleiche angestellt werden sollen und alle getroffenen
Entscheidungen begründet und dokumentiert werden.
8.2 Überarbeiten der Dokumentation
-Textformatierung
durchführen
-Texte auf
Rechtschreibung prüfen
-Überschriften
überarbeiten
-Ausführungen,
Vorgehensweisen, Vergleiche, etc. auf Vollständigkeit untersuchen
9.1 Buch binden lassen
-Läden die
Bücher binden herausfinden
-Preisvergleich
anstellen
-Auswahl eines
Ladens
-Unterlagen
vorbeibringen und Buch binden lassen
-Buch abholen
10.1 Präsentation vorbereiten
-Präsentationsablauf
planen (roter Faden)
-Präsentationsmedien
auswählen und besorgen
-Sonstige
benötigte Dinge besorgen
-Stichwortzettel
erstellen
-Seilwinde zur
Schule bringen
-Einladung für
ILW schreiben und
Inhaltsverzeichnis
5 Testen der Anlage
5.1 Erklärung
Um uns eine
gewisse Übersicht zu verschaffen, in welchen Bereichen die Anlage arbeitet bzw.
welche Anforderungen an unsere späteren Erweiterungen zu stellen sind, mussten
wir die Anlage zuerst einmal in Betrieb nehmen. Hierzu justierten wir die schon
vorhandenen Endschalter nach und schlossen die Anlage wie in der vorhandenen
Dokumentation beschrieben fachgerecht ans Netz an.
Nachdem die
Inbetriebnahme ohne größere Probleme bewältigt wurde, begannen wir die ersten
Tests und Messreihen durchzuführen. Die
Untersuchungen wurden alle unter nahezu gleichen Bedingungen
durchgeführt. Hierbei ist zu beachten, dass das von uns angehängte Gewicht
immer in einem Bereich zwischen 2kg und 16kg lag. Wir wählten diesen Bereich
aus, da wir wie auch schon unsere Vorgänger, die die Anlage aufbauten, zum
Testen eine Getränkekiste zur Simulation der unterschiedlichen Belastungen
verwendeten. Mit dieser Maßnahme konnten wir zum einen Kosten sparen (es
mussten keine teuren Gewichte gekauft werden) und zum anderen konnten die
Gewichte schnell verändert werden (kein aufwendiges An- bzw. Abhängen der
Gewichte).
Aufgrund dieser
Festlegung, wurden auch die im späteren Verlauf des Projektes durchgeführten
Erweiterungen in diesem Bereich getestet und auf diesen Bereich angepasst. Der
Übersicht halber wurde zu den Messreihen eine einheitliche Form von
Messprotokollen verwendet.
Inhaltsverzeichnis
5.2 Ermitteln der Nennlast
und der von uns
ausgewählten Gewichte
Bevor wir mit
den Messungen begannen, ermittelten wir mit Hilfe des Motordatenblattes und den
dort angegebenen Nenndaten die Nennlast.
Durch diese
Berechnung und die von uns ermittelten Gewichte unserer Getränkekiste bzw.
Flaschen wussten wir ungefähr in welchem Bereich wir uns z.B. beim Motorstrom
bewegen.
Motordaten
Nenndaten: - Spannung 24V
DC
- Strom 2A
- Drehzahl 25rpm
- Drehmoment 6Nm
Nennlast:
Kraft:
Die Kraft lässt sich nun aus
diesen Werten berechnen.
Die Erdbeschleunigung
beträgt 9,81.

Moment:
Über die bereits berechnete
Kraft lässt sich mit Hilfe des Wellenradius von 17,5mm das Moment berechnen. Der
Wellenradius wurde mit einem Messschieber ermittelt und durch die vorhandene
Dokumentation bestätigt.

Um
das Gewicht bei Nennmoment zu bestimmen, stellten wir die Formel wie folgt um.
Die Nennlast
beträgt 34,94 kg.
Gewicht der Getränkekiste:
Zum Ermitteln der Gewichte
wurde eine handelsübliche Personen-Waage verwendet.
|
Flaschen
|
Gewicht
|
|
|
|
|
Anzahl
|
kg
|
|
|
|
|
2
|
4,3
|
|
4
|
6,6
|
|
6
|
8,9
|
|
8
|
11,1
|
|
10
|
13,4
|
|
12
|
15,6
|
Aufgrund der ermittelten
Messdaten, wussten wir, dass wir mit einem Motorstrom zu rechnen haben, der
kleiner ist als 2A. Da unsere Gewichte kleiner sind als die berechnete
Nennlast.
Inhaltsverzeichnis
5.3 Stromaufnahme des Motors messen
Ziel der Untersuchung
Um später ggf. die
Stromaufnahme des Motors zu visualisieren oder auch für andere Visualisierungen
bei denen der Strom zur Berechnung notwendig ist, mussten wir vorerst einmal
herausfinden, mit welchen Strömen wir zu rechnen haben. Hierzu führten wir
Messungen beim Anhängen von verschiedenen Gewichten durch.
Messaufbau
Die Messungen wurden mit
einem normalen Multimeter durchgeführt.
Durchführung der Untersuchung
Es wurde die Stromaufnahme
des Motors bei unterschiedlicher Belastung untersucht.
Wir führten die Messung des
Stromes bei 6 unterschiedlich angehängten Gewichten durch.
Messergebnisse
|
Gewicht
|
Strom
|
Strom
|
|
|
(hoch)
|
(runter)
|
|
kg
|
mA
|
mA
|
|
4,3
|
555
|
260
|
|
6,6
|
655
|
225
|
|
8,9
|
750
|
185
|
|
11,1
|
855
|
155
|
|
13,4
|
950
|
135
|
|
15,6
|
1080
|
105
|
Durch die aufgenommenen
Werte konnte je eine Kennlinie für das Verhalten des Stromes beim hochfahren und
beim runterfahren der Last angefertigt werden.
Auswertung der Messergebnisse
Wie man an der
Kennlinie erkennt, hat der Strom, den der Motor bei verschiedener Belastung (im
Bereich von 2-16 kg) aufnimmt einen weitestgehend linearen Verlauf.
Zusammenfassung der Erkenntnisse
Mit dieser
Kennlinie bzw. den Messdaten ist die Möglichkeit gegeben, im späteren Verlauf
des Projektes einen Vergleich mit den Werten, die über verschiedene
Schnittstellen aufgenommen und visualisiert werden sollen anzustellen und so
gegebenenfalls Fehler zu erkennen.
Inhaltsverzeichnis
5.4 Drehzahl messen
Ziel der Untersuchung
Um im späteren Verlauf des
Projektes einen Überblick zu haben in welchen Drehzahlbereichen unsere Anlage
arbeitet, wird das Drehzahlverhalten der Anlage beim Anhängen von verschiedenen
Gewichten untersucht.
Messaufbau
Die bei dieser Messung
verwendeten Messgeräte waren lediglich eine Stoppuhr, um die Zeit zu ermitteln,
die ein bestimmtes Gewicht braucht um einen bestimmten Weg zurückzulegen.
Des Weiteren wurde ein
Maßband verwendet, um die Strecke zu ermitteln, die die Anlage von der unteren
Endlage bis zur oberen Endlage zurücklegt.
Durchführung der Untersuchung
Die verschiedenen Drehzahlen
wurden mit Hilfe der zurückgelegten Strecke und der vergangen Zeit ermittelt.
Hierbei wurde zunächst die Geschwindigkeit und damit anschließend  die Drehzahl ermittelt. Stecke [s]: 0,82m
die Drehzahl ermittelt. Stecke [s]: 0,82m
Messergebnisse
|
Gewicht
|
Zeit
|
Zeit
|
Geschwind-
igkeit
|
Geschwind-
igkeit
|
Drehzahl
|
Drehzahl
|
|
|
|
|
(hoch)
|
(runter)
|
(hoch)
|
(runter)
|
(hoch)
|
(runter)
|
|
|
kg
|
s
|
s
|
m/s
|
m/s
|
1/min
|
1/min
|
|
|
4,3
|
14,35
|
13,19
|
0,057
|
0,062
|
31,20
|
33,94
|
|
|
6,6
|
14,43
|
12,93
|
0,057
|
0,063
|
31,02
|
34,62
|
|
|
8,9
|
14,82
|
12,88
|
0,055
|
0,064
|
30,21
|
34,76
|
|
|
11,1
|
15,19
|
12,81
|
0,054
|
0,064
|
29,47
|
34,95
|
|
|
13,4
|
15,65
|
12,77
|
0,052
|
0,064
|
28,61
|
35,06
|
|
|
15,6
|
15,87
|
12,75
|
0,052
|
0,064
|
28,21
|
35,11
|
|
Auswertung der Messergebnisse
An unseren Messergebnissen
ist zu erkennen, dass wir uns bei den angegebenen Gewichten in einem
Drehzahlbereich von 28 bis 35 Umdrehungen die Minute befinden.
Zusammenfassung der Ergebnisse
Die aufgenommenen Daten
können bei der Auswahl z.B. eines Sensors für die Drehzahlaufnahme als
Entscheidungshilfe verwendet werden.
Inhaltsverzeichnis
6 Strommessung
6.1 Planung der Strommessung
Bei der Strommessung wird
lediglich die Stromaufnahme des Motors aufgenommen. Da an der Anlage ein
Gleichstrommotor verbaut ist, messen wir natürlich auch einen Gleichstrom.
Prinzipiell stehen zur
Erfassung eines Stromes mehrere Verfahren zur Verfügung.
Folgende Verfahren wurden
von uns in Betracht gezogen:
-
Messung der Spannung an einem ohmschen Widerstand
-
Messung des Stromes mit einem Stromwandler
-
Messung des Magnetfeldes mit Hilfe des Magneto-Resistiven Prinzip
Messung der Spannung an einem ohmschen Widerstand
Bei diesem Verfahren würde
ein ohmscher Widerstand in Reihe mit dem Motor geschaltet und der Spannungsfall
an dem Widerstand gemessen.
Wie schon erwähnt würde an
dem Widerstand eine Spannung abfallen, diese Spannung würde aufgrund der
Reihenschaltung mit dem Motor die Spannung am Motor begrenzen, das heißt an dem
Motor würden nicht mehr die vollen 24V sondern nur noch 24 V weniger der
Spannung die am Widerstand abfällt, anliegen.
Es ist auch noch anzumerken,
dass für eine solche Messung nicht jeder normale Widerstand genommen werden
kann, sondern ein spezieller Messwiderstand verwendet werden muss. Da je größer
der Strom ist, auch eine größere Leistung im Messwiderstand umgesetzt wird. Aus
diesem Grund wird eine solche Messung meistens nur bei kleinen Leistungen
verwendet.
Messung des Stromes mit einem Stromwandler
Die
Messung des Stromes geschieht nach dem Transformatorprinzip und ist galvanisch
getrennt. Es können nur Wechselströme gemessen werden, da bei Gleichströmen
keine Magnetfeldänderung entsteht.
Messung des Magnetfeldes mit Hilfe des
Magneto-Resistiven Prinzip
Als magnetoresistive
Effekte bezeichnet man alle Effekte, die die Änderung des elektrischen
Widerstands eines Materials durch Anlegen eines äußeren Magnetfeldes
beschreiben.
6.2
Entscheidungsmatrix
|
|
|
|
|
|
|
|
|
|
ohmischer Widerstand
|
Stromwandler
|
Magneto-Resestiven
|
|
|
|
|
Wie?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Was?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
keine Leistungsverluste
|
5
|
3
|
1
|
|
einfaches Handling
|
2
|
3
|
4
|
|
kostengünstig
|
2
|
3
|
1
|
|
Gleichstrommessung möglich
|
1
|
5
|
1
|
|
Bedeutung
|
10
|
14
|
7
|
1= sehr gut / 5=schlecht
Inhaltsverzeichnis
6.3 Das Strommess-IC
Das Prinzip des
Magneto-Resistiven-Effektes wird bei den Strommess-IC’s der Baureihe CMS2000
von der Firma Sensitec angewandt. Die angesprochenen IC’s gibt es in
verschiedenen Ausführungen, die sich in der Höhe der Nennströme unterscheiden (
5A, 15A, 25A, 50A ).
Das IC besteht im Prinzip
aus einer Messbrücke mit Magneto-Resistiven Widerständen, einer OP-Schaltung
und einem Messwiderstand.
Der Sensor gibt eine dem Strom bzw. Magnetfeldstärke
proportionale Spannung am integrierten Messwiderstand RM aus. Diese
entsteht über eine Wheatstone-Brücke mit Magneto-Resistiven-Widerständen und
wird durch eine OP-Schaltung verstärkt.
Wir
entschieden uns dafür den CMS 2005 einzusetzen, da dieser einen Nennstrom von
5A hat und wir mit einem Strom von ca. 2A in dem von uns untersuchten Bereich
zu rechnen haben.
Bei
dem ausgewählten Strommess-IC CMS2005 soll laut Datenblatt bei einem fließenden
Strom von 5A am Ausgang gegen Masse eine Spannung von 2,5 V
anliegen.
|
Parameter
|
CMS2005
|
Div.
|
|
Primary nominal current, effective
|
5
|
A
|
|
Primar measurement range
(for 3s)
|
0...±15
|
A
|
|
Overload
|
10x I
|
A
|
|
Output voltage at ± I
|
±2,5
|
V
|
|
Internal resistor of the
CMS2000
|
<150
|
Ω
|
|
Power voltage
|
±12..±15
|
V
|
Inhaltsverzeichnis
6.4 Testen des Strommess-IC´s
Ziel der Untersuchung
Mit
den folgenden Messungen wurde die Linearität und das Übersetzungsverhältnis von
fließendem Strom zu ausgegebener Spannung des Strommess-IC’s untersucht.
Messaufbau
Durchführung der Untersuchung
Das
Strommess-IC wurde ordnungsgemäß wie in den Datenblättern angegeben an eine
Versorgungsspannung von +/- 12 V angeschlossen ( Pin1 und Pin2 ).
Anschließend
wurde eine einstellbare Spannungsquelle an den Pins I in und I out
angeschlossen um somit das Verhalten des IC’s bei verschiedenen Strömen
untersuchen zu können. Am Ausgang des Sensors, das heißt am integrierten
Messwiderstand Rm zwischen Pin 5 und Pin 4 wurden die verschiedenen
Ausgangsspannungen aufgenommen.
|
Ieinstell
|
UOut
|
|
|
|
|
0,5
|
0,23
|
0,45
|
|
|
0,6
|
0,27
|
0,45
|
|
|
0,7
|
0,31
|
0,45
|
|
|
0,8
|
0,36
|
0,45
|
|
|
0,9
|
0,39
|
0,44
|
|
|
1
|
0,45
|
0,45
|
|
|
1,1
|
0,5
|
0,45
|
|
|
1,2
|
0,54
|
0,45
|
|
|
1,4
|
0,63
|
0,45
|
|
|
1,5
|
0,67
|
0,45
|
|
|
1,7
|
0,75
|
0,44
|
|
|
1,9
|
0,81
|
0,43
|
|
|
2
|
0,88
|
0,44
|
|
|
2,5
|
1,13
|
0,45
|
|
|
3
|
1,34
|
0,45
|
|
|
3,5
|
1,53
|
0,44
|
|
|
4
|
1,76
|
0,44
|
|
|
4,5
|
2,02
|
0,45
|
|
|
5
|
2,26
|
0,45
|
|
Die
geringen Abweichungen sind auf Ablesefehler, Toleranzbereiche der Messgeräte
und Ungenauigkeiten beim Verstellen der einstellbaren Spannungsversorgung
zurückzuführen.
Auswertung der Messergebnisse
An
den Messergebnissen ist zu erkennen, dass sich die Ausgangsspannung, in dem von
uns untersuchten Bereich unseres IC’s, zum angelegten Strom am Eingang proportional
verhält. Das heißt sie weist ein lineares Verhalten auf.
Die
leichten Abweichungen sind auf Messgeräteungenauigkeit und Ungenauigkeit beim
Ablesen zurückzuführen.
Zuseammenfassung der Ergebnisse
Mit den von uns
erarbeitenden Ergebnissen ließ sich ein Übersetzungsverhältnis von Strom zu
Spannung berechnen. Dieses Übersetzungsverhältnis benötigten wir um später beim
einlesen der Spannung vom IC in die C-Control diese dann auch wieder in den zu
visualisierenden Strom umsetzen zu können.
Übersetzungsverhältnis von
fließendem Strom zur ausgegebenen Spannung berechnen:
Inhaltsverzeichnis
6.5 Messbereichsanpassung
Die Strommessung erfolgt
über einen Analogeingang des Mikrocontrollers.
Unser ausgewählter
Mikrocontroller besitzt acht 8-Bit analoge Eingänge und arbeitet mit der
Standard Referenzspannung von 5V, das heißt der analog eingelesene
Spannungswert zwischen 0 und 5V wird in eine numerische Größe zwischen 0 und
255 (8-Bit) umgewandelt.
Bei der
Messbereichserweiterung gehen wir aufgrund unseres festgelegten Bereiches (2-16
kg) davon aus, das der zu erwartende Strom kleiner ist als der Nennstrom. Um
mit einem glatten Wert rechnen zu können und eine gewisse Reserve nach oben zu
haben, gingen wir dennoch von einem maximalen Stromfluss von 2A (Nennstrom)
aus.
Bei einem Strom von 2A und
dem von uns ermittelten Übersetzungsverhältnis von 0,45 Volt pro Ampere ergibt
sich somit eine Spannung von ca. 0,9V am analogen Eingang. Somit wird weniger
als ein fünftel der Referenzspannung ausgenutzt.
Um die Ausgangsspannung des
Strommess-IC’s an die Referenzspannung der C-Control anzupassen und somit das
genauere Abbilden des eingelesenen Wertes zu ermöglichen, wird das Signal wie
folgt verstärkt:
Zur Verstärkung des Signals
wird ein Operationsverstärker verwendet, der als nichtinvertierender Verstärker
geschaltet ist.
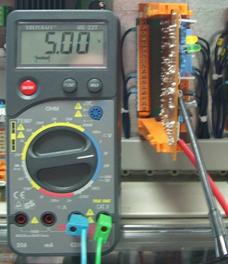
Beispielmessung:

In Abbildung 1 wurde die
Spannung am Ausgang des Strommess-IC’s vor der Verstärkerschaltung aufgenommen
und in Abbildung 2 nach der Verstärkerschaltung.
Man erkennt nun, das wir
durch die Schaltung, wie gewollt, eine Verstärkung von 4,3 erhalten.
Inhaltsverzeichnis
6.6 Blockschaltbild Stromaufnahme
Inhaltsverzeichnis
7 Drehzahlmessung
7.1 Planung der Drehzahlmessung
Es gibt verschiedene Methoden, die Drehzahl zu
bestimmen.
Eine Methode ist, eine Welle oder eine Scheibe mit
Markierungen zu verwenden.
Die Drehzahl ergibt sich dann aus der Anzahl der
gezählten Markierungen pro Zeiteinheit. Im Allgemeinen wird sie in Umdrehungen
pro Minute angegeben. Diese Art von Sensoren wird oft auch als Inkrementalgeber
bezeichnet. Hierbei gibt es Inkrementalgeber, die photoelektrisch, magnetisch
oder mit Schleifkontakten arbeiten.
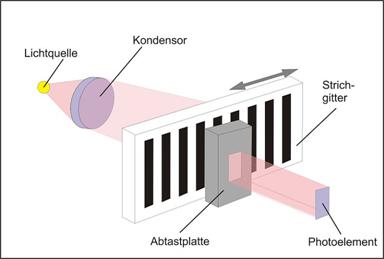
Wir entschieden uns für die
photoelektrische Abtastung eines rotierenden optischen Gebers.
Prinzip der photoelektrischen
Abtastung:
Bei unseren Recherchen
stießen wir nun schnell auf den optischen Sensor CNY70, der eine solche
optische Abtastung ermöglicht.
7.1.1 CNY70
Der CNY70 ist eine
Reflektionslichtschranke mit einer integrierten Infrarotdiode. Bei diesem
Bauteil wird ein Infrarotsignal ausgesendet und nach dem reflektieren an einer
Reflektionsschicht wieder von einem Fototransistor aufgefangen. Dieser gibt
dann eine Spannung aus, die man auswerten kann.
Bei dieser Methode hätten
wir selbst eine Scheibe mit Markierungen entwerfen und anfertigen müssen die
uns die Möglichkeit geboten hätte das ausgesendete Signal der Infrarotdiode zu
reflektieren und so weiter verarbeiten zu können. Da es bei dieser Methode zu
Problemen bei der Belichtung kommen kann und somit eventuelle platzintensive
Erweiterungen wie zusätzliche Lichtquellen notwendig sind, diese aber bei uns
durch zu wenig Platz nicht zu verwirklichen wären, entschieden wir uns gegen
den CNY70.
Nach weiteren Recherchen im
Internet wurden wir auf Inkrementalgeber aufmerksam, bei denen eine
Gabellichtschranke eine mitgelieferte Taktscheibe abtastet.
Wir entschieden uns dafür
die Drehzahlerfassung mit dieser platzsparenden Variante durchzuführen.
7.1.2 Incrementalgeber
Gabellichtschranke GP1A30R mit Taktscheibe 120
Impulse/Umdrehung
Bei diesem Sensorsystem zur inkrementalen Rotationserfassung tastet
eine Gabellichtschranke eine Taktscheibe mit 120 Impulsen pro Umdrehung ab.
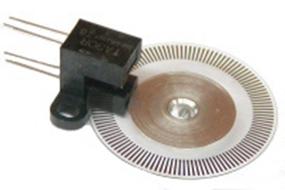
Aus den phasenverschobenen Ausgangssignalen A und B können sowohl
Drehzahl als auch Drehrichtung ermittelt werden.
Technische Daten: - Taktscheibe 120 Impulse/Umdrehung
 - Wellendurchmesser 3,9...4 mm einstellbar
- Wellendurchmesser 3,9...4 mm einstellbar
- Scheibendurchmesser 31,6 mm
- Betriebsspannung 5V DC
- maximale Schaltfrequenz 10 kHz
Aufgrund
eines Defektes der Gabellichtschranke, der durch die mechanische Beanspruchung
der Anschlüsse, beim Einbau und der Verdrahtung zustande kam, musste die
Lichtschranke ausgetauscht werden und durch ein schnell erhältliches Modell
ausgetauscht werden.
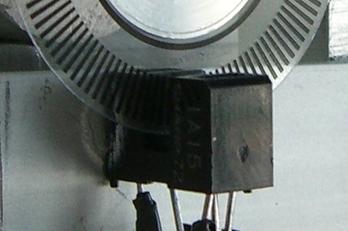
Zur
Aufnahme der Drehzahl wurde aus den oben genannten Gründen die
Gabellichtschranke GP1A15 der Firma Sharp verwendet.
Diese
funktioniert ähnlich wie die geplante Gabellichtschranke. Sie tastet wie
geplant die Taktscheibe optisch ab und gibt eine, der Frequenz der Inkremente,
entsprechende Rechteckspannung aus. Diese Spannung wird von uns genutzt um die
Drehzahl zu ermitteln.
Da
uns das neue Bauteil nur ein Ausgangssignal liefert und nicht wie die
GP1A30R 2 phasenverschobene Signale,
können wir die Drehrichtung bzw. Hoch- oder Runterfahren nicht mit der
Lichtschranke ermitteln.
Aus
diesem Grund mussten wir improvisieren und verbauten 2 Relais, die dazu dienen
die Signale von unseren Tastern für hoch- bzw. runterfahren aufzunehmen und an
den Mikrocontroller weiterzugeben.

Spulenspannung 5-48V DC
max.
Schaltstrom 16A
max.Schaltleistung 4000 VA
max.
Einschaltstrom 80A
Inhaltsverzeichnis
7.2 Entscheidungsmatrix
|
|
|
|
|
|
|
|
|
|
Photoelektrisch
|
Magnetisch
|
Schleifkontakte
|
|
|
|
|
Wie?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Was?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Schmutzunabhängig
|
3
|
1
|
2
|
|
einfache Installation
|
1
|
2
|
4
|
|
platzsparend
|
1
|
3
|
3
|
|
kein mechanischer Verschleiß
|
1
|
1
|
5
|
|
Bedeutung
|
6
|
7
|
14
|
1 = sehr gut / 5 = schlecht
|
|
|
|
|
|
|
|
|
|
CNY70
|
Incrementalgeber
|
|
|
|
|
Wie?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Was?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Arbeitsaufwand
|
4
|
2
|
|
platzsparend
|
3
|
1
|
|
Genauigkeit
|
3
|
2
|
|
Bedeutung
|
7
|
5
|
1 = sehr gut / 5 = schlecht
7.3 Blockschaltbild Drehzahlaufnahme

Inhaltsverzeichnis
8 Planung der Gewichtsbestimmung
Die Anlage soll die
Möglichkeit bieten im Betrieb, das heißt beim Hoch- bzw. Runterfahren der Last
in irgendeiner Form darzustellen, welches Gewicht gerade angehängt ist.
Es besteht hierbei die
Möglichkeit das Gewicht durch Einbau von Sensoren, wie zum Beispiel einen
Drehmomentsensor, in verschiedene Teile der Anlage (z.B. an die Welle) zu
bestimmen. Diese Ausführung würde allerdings wieder für zusätzliche Kosten
sorgen und würde wahrscheinlich viel Zeit in Anspruch nehmen, da wieder
verschiedene Möglichkeiten (z.B. Sensoren) untersucht werden müssten.
Um diese Zeit- und
Kostenintensiven Maßnahmen zu umgehen, entschlossen wir uns dazu, die
Bestimmung des Gewichtes durch Berechnungen im PC zu verwirklichen.
8.1 Durchführung
8.1.1 Ideen
Unsere erste Idee war es,
mit Hilfe des aufgenommenen Motorstromes und der konstanten Spannung die
elektrische, zugeführte Leistung des Motors zu bestimmen.
Anschließend sollte dann die
mechanische, abgegebene Leistung berechnet werden.
Mit dieser Methode hätte
dann das Drehmoment mit Hilfe der von uns aufgenommenen Drehzahl bestimmt
werden können.
Um auf das Gewicht zu
schließen, hätte nun nur noch die aufgebrachte Kraft mit Hilfe der Länge
unseres Hebelarms (Radius der Welle) berechnet werden müssen, um dann mit der
Erdbeschleunigung auf die zu bestimmende Masse zu kommen.

8.1.2
Probleme beschreiben
Ein Problem das wir bei dieser
Vorgehensweise nicht bedacht hatten, ist die Tatsache, dass die Anlage einen
sich ändernden Wirkungsgrad hat und wir somit nicht auf unsere abgegebene
Leistung (mechanische Leistung) schließen können. Aus diesem Grund fehlen uns
dann diese Informationen um weiter zu rechnen und so auf unser Gewicht
schließen zu können.
8.1.3
Verbesserungsvorschläge
Aufgrund der beschriebenen
Probleme und einiger Berechnungsversuche in Delphi, die uns allerdings keine
verwertbaren Ergebnisse lieferten, war es uns nicht möglich die
Gewichtsbestimmung in der vorgegebenen Zeit zu vollenden.
Wir machten uns aber noch
einige Gedanken darüber, wie man eine Gewichtsbestimmung an der Anlage, trotz
der angesprochenen Probleme, verwirklichen könnte. Hierzu müsste man unserer Meinung
nach einen Sensor einbauen, der uns die fehlenden Informationen über die
abgegebene Leistung oder über das Drehmoment liefert.
Es könnten z.B Sensoren zur
Erfassung eines Drehmomentes oder einer Kraft verwendet werden.
Bei unseren Recherchen im
Internet stießen wir auf eine Messwelle mit der Bezeichnung T22. Diese
Messwelle ist laut Herstellerangabe zuverlässig und kompakt. Der letzt genannte
Punkt wäre für uns ein wichtiges Entscheidungskriterium gewesen, da wir
aufgrund der Konstruktion der Anlage platzsparende Varianten in betracht ziehen
mussten.
Herstellerangaben:
Produktbeschreibung
Bei Bedienung und Installation fügt sich
T22 schnell und einfach in Prüf-
und Testaufgaben ein:
·
Elektronik inklusive: Mit der bereits in der Messwelle integrierten Elektronik
können Zeit und Kosten gespart werden, da keine weiteren externen Verstärker
verbaut werden müssen
·
Schnell installiert: Mit den passenden Kupplungen, lieferbar für alle Baugrößen
von T22.
·
Kompakt im Design: für räumlich begrenzte Prüfaufbauten bestens geeignet
Fakten
T22 erfasst Drehmoment auf Basis von
Dehnungsmessstreifen. Die Übertragung von Energie und Messsignal erfolgt
berührungslos. T22 ist in Nenndrehmomenten von
5 Nm bis 1 kNm verfügbar.
T22 eignet sich vor allem für das dynamische und statische Messen von
Drehmoment. Typische Einsatzgebiete sind Labor, Prüffeld, Versuch und Lehre.
Technische Daten
Charakteristische Merkmale
- Nenndrehmomente 5 Nm, 10 Nm, 20 Nm, 50 Nm, 100
Nm, 200 Nm, 500 Nm und 1 kNm
- Berührungslose Messsignalübertragung
- Messen an rotierenden oder ruhenden Teilen
- Drehmoment-Ausgangssignal ±5 V und 10±8 mA
Bei einer Weiterführung des
Projektes sollte die Möglichkeit der Drehmomenterfassung mit diesem
Drehmomentaufnehmer weiter untersucht und in betracht gezogen werden. Die
Datenblätter der Messwelle T22 befinden sich auf der beiliegenden CD.
Inhaltsverzeichnis
9 Lagebestimmung
9.1 Planung der Lagebestimmung
Nach Beendigung der
Arbeiten, soll es möglich sein durch eine Visualisierung auf einem PC zu
erkennen in welcher Höhe sich das Gewicht momentan befindet und ob sich die
Last gerade bewegt oder still steht.
Hierzu verwenden wir die
Signale der beiden, an der Anlage vorhandenen Taster für das Hoch- bzw
Runterfahren.
Sobald diese gedrückt sind,
bedeutet das entweder Hoch- oder Runterfahren. Ist keiner der Taster betätigt
befindet sich die Anlage im Stillstand.

9.2 Durchführung der Lagebestimmung
Die Signale der beiden
Taster werden auf 2 analoge Eingänge des Mikrocontrollers geführt und dann weiterverarbeitet.
Da die Taster uns eine
Spannung von 24V liefern, unser Mikrocontroller aber nur eine Spannung von 5V
verarbeiten kann, verwenden wir für die Verarbeitung der Signale 2 Relais, die
beim anliegen von 24V (Tastersignal) eine Spannung von 5V auf die analogen
Eingänge des Mikrocontrollers schaltet.
10 Auswahl eines Mikrocontrollers
Bei
der Auswahl eines Mikrocontrollers konzentrierten wir uns größten Teils auf
C-Control-Mikrocontroller
der Firma Conrad, da diese mit der Programmiersprache Basic programmiert werden
und diese der Programmiersprache Delphi, die wir im Rahmen der Ausbildung zum
Techniker erlernt haben, ähnlich ist.
Zu
Beginn unserer Recherchen beschäftigten wir uns außerdem noch mit dem
Controller ATmega32 von der Firma Atmel, da dieser genau wie die
Mikrocontroller der C-Control Generation 1 auf 8-Bit Mikroprozessoren basieret.
Nähere Betrachtungen wurden aber nicht weiter ausgeführt, da dieser mit den uns
nicht bekannten Programmiersprachen Assembler oder C programmiert wird und wir
uns nicht sicher waren, ob die uns zur Verfügung stehende Zeit reichen würde um
uns in eine dieser Programmiersprachen einzuarbeiten.
Bei
der Firma Conrad Electronics bot sich uns nun eine große Auswahl an
Mikrocontrollern der C-Control Serie, die mittlerweile aus 3 Obergruppen
besteht
(C-Control
1, C-Control 2, C-Control Pro), die wiederum mehrere Untergruppen beinhalten.
Bei
unserer weiteren Suche beschränkten wir uns auf die Auswahl, die uns die Gruppe
der C-Control 1 bot.
Hierbei
entschieden wir uns für die M-Unit 2.0. Dazu ist zu sagen, dass unsere
Recherchen ergaben, dass uns prinzipiell im Bezug auf unsere Anforderungen
gesehen, die alte M-Unit 1.1 auch gereicht hätte. Da preislich aber keinerlei
unterschied bestand, entschieden wir uns für die M-Unit 2.0. Bei dieser
Ausführung wurde im Vergleich zur alten die Ausführungsgeschwindigkeit deutlich
verbessert. Die Taktrate der neuen M-Unit beträgt 32MHz wobei die ältere
Version lediglich mit einer Taktrate von 4 MHz arbeitet. Außerdem verfügt die
M-Unit 2.0 über 116 Byte mehr Variablenspeicher als die M-Unit 1.1.
Ein
weiteres Entscheidungskriterium war, dass es mit der M-Unit 2.0, laut unserer
Informationen, einfach möglich sei über eine Extended-Funktion ein LC-Display anzusteuern.
Dies, so überlegten wir könnte uns bei der internen Visualisierung nützlich
sein.
|
|
|
|
|
|
|
|
|
|
C-Control 1 M-Unit 2.0
|
C-Control 1 M-Unit 1.1
|
Atmel ATmega32
|
|
|
|
|
Wie?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Was?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bekannte Programmiersprache
|
3
|
3
|
5
|
|
einfaches Handling
|
3
|
3
|
4
|
|
kostengünstig
|
3
|
3
|
2
|
|
Informationsmaterial
|
2
|
2
|
4
|
|
Preis/Leistungs- Verhältnis
|
3
|
4
|
2
|
|
Bedeutung
|
14
|
15
|
17
|
sehr gut =1/schlecht=5
Inhaltsverzeichnis
10.1 Aufbau der C-Control M-Unit 2.0
Von uns verwendete Ports:
- Ad2: Anschluss:
Ausgang Strommess-IC (Motorstrom)
- AD4: Anschluss:
Tastersignal (runter)
- AD6: Anschluss:
Tastersignal (hoch)
- +5V: Anschluss:
Versorgungsspannung (+5V)
- Freq1: Anschluss:
Ausgang Gabellichtschranke (Drehzahl)
- Port9-16: Anschluss:
Display
- GND: Anschluss:
Masse
10.2 Beschreibung der verwendeten
Ein-/Ausgänge
Analoger Eingang
Die
C-Control M-Unit 2.0 verfügt über acht analoge Eingänge mit einer Auflösung von
jeweils acht Bit. Die analogen Eingänge wandeln die anliegende Spannung
zwischen 0 und 5V (Referenzspannung) in eine numerische Größe zwischen 0 und
255 (8-Bit) um. Diese Größe kann vom Mikroprozessor weiterverarbeitet werden.
Sie kann im Programm wie eine normale Variable behandelt werden, das heißt man
kann sie abfragen, speichern oder mit ihr rechnen.
Durch
die Auflösung von 8-Bit können Spannungen mit einer Genauigkeit von 19,5 mV
gemessen werden.
Frequenz Eingang
Die
C-Control M-Unit 2.0 besitzt 2 Frequenz Eingänge, die mit den Bezeichnungen
FREQ 1 und FREQ 2 versehen sind. Diese können zur Messung von Impulsen und
Ereignissen verwendet werden. Beide Eingänge können Frequenzen bis zu 32 kHz
darstellen.
Die
Frequenzeingänge benötigen neben einem Impulszähler auch ein Zeitintervall in
dem die Impulse gezählt werden. Diese Zeit ist bei der C-Control auf eine
Sekunde eingestellt und kann nicht geändert werden.
11 Spannungsversorung für unsere
Bauteile
Für
die Spannungsversorgung von unseren Bauteilen, fertigten wir eine Platine an,
von der wir alle Spannungen abgreifen können. Diese wurde aus verschiedenen
Elementen von alten Platinen (Energieelektroniker Zwischenprüfung)
zusammengebaut.
Die
Versorgungsspannung für diese Platine wird von einem Transformator mit
Ausgangsseitig 2x 15V AC geliefert.
|
Inkrementalgeber
|
5V DC
|
1,2V DC
|
|
Strommess-IC
|
+/- 12V DC
|
|
|
C-Control
|
5V DC
|
|
Inhaltsverzeichnis
11.1 Spannungsversorgung herstellen
Da wir zu Beginn des
Projektes noch nicht wussten welche Bauteile nachgerüstet werden und erst während
der Planungsphase klar wurde, welche Spannungen für den Anschluss dieser
Elemente zur Verfügung gestellt werden müssen, wurde im Zeitplan ein Punkt
„Spannungsversorgung herstellen“ nicht berücksichtigt.
Nachdem die Planungsphase
abgeschlossen war wussten wir, dass wir mehr verschiedene Spannungen brauchen,
wie zu Beginn erwartet.
Aufgrund unserer
Vorstellungen und Ziele die Erweiterungen an der Seilwinde möglichst klein zu
halten, entschieden wir uns dazu, eine Spannungsversorgungsplatine selber zu entwerfen
und anzufertigen, die uns alle benötigten Spannungen liefert.
Um uns die Aufgabe zu
erleichtern und die Kosten möglichst gering zu halten, orientierten wir uns
beim Bau der Platine an alten Platinen von Energieelektroniker-Prüfungen und
Zwischenprüfungen. Dies erbrachte uns außer der Zeitersparnis, durch das
übernehmen von bestimmten Schaltungselementen, auch noch eine enorme
Kostenersparnis, da die von uns benötigten Bauteile zum erstellen der Platine
zum größten Teil aus Platinen ausgelötet werden konnten, die von der ILW
aufgrund der abgeänderten Prüfungen ausgesondert werden sollten.
Der Punkt
„Spannungsversorgung herstellen“ musste also im Zeitplan zwischen den Punkten 3
und 4 ergänzt werden. Außerdem wurde auch ein Meilenstein „Spannungsversorgung
in Betrieb genommen“ eingefügt. Die Arbeiten an der Spannungsversorgungsplatine
wurden in den Kalenderwochen 51, 52, 1 und 2 durchgeführt.
Die Arbeiten bestanden
darin, aus den verschiedenen von uns ausgewählten Schaltungselementen einen
bzw. mehrere Schaltpläne zu erstellen, die so wenig wie möglich Bauteile
beinhalten, um die Schaltungen später auf einer Streifenrasterplatine
unterbringen zu können. Eine weitere Aufgabe bestand darin nun ein
Platinenlayout anzufertigen, welches das Einlöten der Bauteile um einiges
vereinfacht. Anschließend musste die Platine gelötet und getestet werden. Nach
Beendigung der Arbeiten konnten wir eine Spannungsversorgungsplatine in unsere
Anlage implementieren, die uns alle notwendigen Spannungen liefert.
11.3 Stückliste
C1 Elko,
10µ C2 Elko, 10µ
C3 Kondensator,
100n C4 Kondensator, 100n
C5 Kondensator,
100n C6 Kondensator, 100n
C7 Elko,
100µ C8 Elko, 100µ
C9 Elko,
10µ C10 Elko, 1µ
C11 Kondensator,
0,22µ C12 Kondensator, 0,22µ
C13 Elko, 10µ C14 Elko, 1µ
R1 Widerstand,
470 R2 Widerstand, 470
R3 Widerstand,
470 R4 Widerstand, 240
R5 Widerstand, 240
D1 LED, gelb D2 LED, grün
D3 Diode, 1N4007 1000V/1A D4 Diode, 1N4007 1000V/1A
D5 Diode, 1N4007 1000V/1A D6 Diode, 1N4007 1000V/1A
D7 Diode, 1N4007 1000V/1A D8 Diode, 1N4007 1000V/1A
U1 Regler,
negativ, 7912 U2 Regler, 7812
U3 Regler,
LM317T U4 Regler , LM317T
KK1 SK13/35
SA, Kühlkörper KK2 SK13/35 SA, Kühlkörper
KK3 SK13/35
SA, Kühlkörper KK4 SK13/35 SA, Kühlkörper
P1 Trimmer
, 500 P2 Trimmer , 500
Si1 Feinsicherung
1A / 250V Si2 Feinsicherung 1A / 250V
11.4 Spannungsversorgungsplatine testen
Ziel der Untersuchung
Ziel war es, zu untersuchen,
ob die Platine die von uns benötigten Spannungen liefert. Außerdem sollte
überprüft werden ob es uns gelungen ist, auf der Platine, trotz der Verwendung,
von verschiedenen Schaltungen, eine gemeinsame Masse an allen
Spannungsabgriffen, zu erhalten.
Messaufbau
Schaltplan:
Inhaltsverzeichnis
Durchführung der
Untersuchung
Inhaltsverzeichnis
Auswertung der
Messergebnisse
Die
geforderten Spannungen konnten alle auf unserer Spannungsversorgungsplatine
eingestellt bzw. gemessen werden.
Außerdem
wurde die Forderung der gemeinsamen Masse erfüllt.
Zusammenfassung der
Ergebnisse
Die
Platine kann zur Spannungsversorgung für alle unsere nachzurüstenden
Komponenten verwendet werden.
12 Planung der Projektwoche (KW 4)
- Halterungen für Platinen
entwerfen, anfertigen und anbringen
- Layout für
Elektronikplatine entwerfen und anfertigen
- Strommess-IC testen
- Incrementalgeber und
Strommess-IC an C-Control anbinden
- Dokumentation bearbeiten
- PC besorgen (
Betriebssystem installieren, Delphi installieren )
- Schnittstelle an
Installationskasten anbringen
- Verdrahtung im
Installationskasten anbringen
- Kabel für die Anbindung an
den PC besorgen
- In Basic einarbeiten
- In Delphi einarbeiten
In der Projektwoche konnten
weitestgehend alle geplanten Punkte abgearbeitet werden.
Ein großer Vorteil der
Projektwoche bestand darin, dass eine Woche am Stück gearbeitet werden konnte,
ohne große Pausen zu haben.
Inhaltsverzeichnis
13 Einbau der Komponenten
Nachdem wir die
Planungsphase beendet und somit unsere Bauteile ausgewählt hatten, konnten wir eine
Bestellliste erstellen und dann unsere Bauteile bestellen.
Bestellliste
|
Bestellnummer
|
Artikelbezeichnung
|
Einzelkosten
|
bezogen von
|
|
198822
|
C-Control
|
26,62€
|
Conrad
|
|
|
CMS 2005 SP3
|
-
|
Sensitec
|
|
|
Incr120 GP1A30
|
13,78€
|
Krause Robotics
|
|
198834
|
Programmiermodul
|
30,72€
|
Conrad
|
|
504389
|
Netzrelais
|
1,50€
|
Radio Erbar
|
|
504389
|
Netzrelais
|
1,50€
|
Radio Erbar
|
|
198876
|
IIC Schnittstellenkabel
|
5,08€
|
Conrad
|
|
|
LCD 162 DIP
|
16,35€
|
Reichelt
|
|
|
LCD Front 2
|
6,35€
|
Reichelt
|
|
|
Gabellichtschranke GP1A15
|
2,50€
|
Radio Erbar
|
|
|
|
104,40€
|
|
Einige, für den Einbau
wichtige Komponenten, konnten wir von der ILW beziehen, da diese dort vorrätig waren.
Hierzu gehörte unter anderem der Installationskasten, indem der größte Teil der
Erweiterungen untergebracht werden konnte. Kabel, Aderendhülsen, etc. wurden
ebenso von der ILW zur Verfügung gestellt.
Nachdem dann die bestellten
Bauteile geliefert wurden, konnten wir mit dem Einbau beginnen.
Wir begannen damit die
Bauteile für die Drehzahlaufnahme zu
installieren.
Um
das ausgewählte Sensorsystem zu montieren, ließen wir den vorhandenen
Gewindestab, der zur Erfassung der oberen und unteren Endlage an der Anlage
bereits vorhanden war, ein kleines Stück abdrehen. Nun konnten wir die
Taktscheibe am Ende dieses Stabes montieren.
Um
die Sensorgabel zu befestigen, verwendeten wir ein einfaches, dünnes Blech, das
an die vorhandene Konstruktion montiert wurde.
Als nächstes bauten wir den
Schnittstellenadapter in die linke Seitenwand des Installationskastens ein.
Zusätzlich installierten wir noch einen Schalter, der das Ziehen bzw. Stecken
des Jumpers der C-Control simuliert. Hierzu ist zu sagen, dass der Jumper beim
Programmieren, das heißt beim senden eines Programms an die C-Control immer gezogen werden muss.
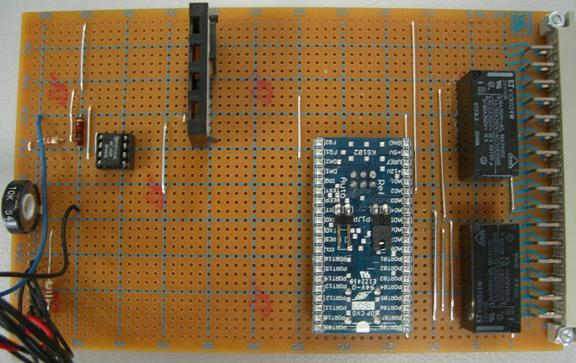
Die übrigen Erweiterungen
wie die C-Control, Strommess-IC,
OP-Schaltung, Display und Relais wurden
auf einer separaten Platine installiert.
Zum
Schluss wurden dann alle Komponenten im Installationskasten so untergebracht,
dass auch nach der Beendigung unseres Projektes, eine gewisse Reserve für
spätere Erweiterungen und Änderungen besteht.
Anschlussbelegung der Platinenhalter:
Platinenhalter X1
Klemme Anschluss/Abgriff Beschreibung Wohin/Woher
X1:c4 Anschluss +14V Trafo
X1:c6 Anschluss 0V Trafo
X1:c8 Anschluss +14V Trafo
X1:a2 Abgriff -12V Platine X2:a12
X1:a26 Abgriff 0V Platine X2:c10
X1:c16 Abgriff +12V Platine X2:c12
X1:c26 Abgriff +5V X5:10 Inc OP
X1:c30 Abgriff +1,2V X5:6 Inc Diode
X1:c18 Abgriff 0V X5:7 Inc -
X1:a20 Abgriff +5V Platine X2:c14
PlatinenhalterX2
Klemme Anschluss/Abgriff Beschreibung Wohin/Woher
X2:a12 Anschluss -12V Strommess
IC -Vs
X2:c10 Anschluss 0V Strommess
IC GND
X2:c12 Anschluss +12V Strommess
IC +Vs
X2:c14 Anschluss +5V C-Control
X2:c4 Anschluss Iin Strommess IC Iin
X2:a10 Abgriff Iout Strommess IC Iout
X2:c8 Abgriff Vout Strommess IC
X2:a8 Anschluss Frequenz Incrementalgeber
X2:c32 Anschluss +24V hoch Q2:A1
X2:a22 Anschluss 0V X1:10
X2:c6 Anschluss +24V
runter Q3:A1
13.1 Blockschaltbild
Inhaltsverzeichnis
14 Visualisierung
14.1
Planung der internen Visualisierung
Als interne Visualisierung
bezeichnen wir die Möglichkeit, aufgenommene Werte direkt an der Anlage
darstellen zu können, ohne diese über eine Schnittstelle an einen PC weiterzugeben
und dort auf dem Bildschirm zu visualisieren.
Die ersten Ideen und
Recherchen gingen in die Richtung, dass wir ein Grafikdisplay in die Anlage
implementieren wollten. Diese Maßnahme wäre jedoch mit den anderen im
Projektplan festgelegten, zu erledigenden Aufgaben zu teuer und zu umfangreich
geworden.
Um dennoch unsere
Visualisierung direkt an der Anlage zu verwirklichen, informierten wir uns über
verschiedene LC Displays die lediglich Texte ausgeben können. Hierbei stießen
wir im Internet auf einige Displays die ohne großen Programmieraufwand und ohne
viel Geld auszugeben an unsere C-Control angeschlossen werden können.
14.1.1
Duchführung
Aus Kostengründen
entschlossen wir uns dann für ein Display, das an die digitalen Ports (Port
9-16) unserer C-Control angeschlossen werden kann und gegen das von uns schon
bestellte IIC-LC-Display. Dieses letztgenannte Bauteil konnten wir dann auch
wieder ohne Probleme und zusätzliche Unkosten zurückschicken.
Die erarbeiteten Ergebnisse,
befinden sich hierbei im Kapitel 16.2 C-Control ff.
Pinbelegung des Displays:
14.2
Planung der externen Visualisierung
Unsere zweite Möglichkeit aufgenommene
Werte visualisieren zu können, sollte darin bestehen, die Werte über eine
Schnittstelle, die an der Anlage fest installiert werden sollte, an einen PC
weiterzugeben und dann auf einem Bildschirm auszugeben.
Zum testen stellte uns die
ILW einen PC mit dazugehörigem Bildschirm zur Verfügung.
14.2.1
Durchfühung
Hierbei wurde lediglich
Softwaretechnisch gearbeitet, das heißt die Durchführung befindet sich im
Kapitel 16 Software unter Überschrift 16.1 Delphi.
Inhaltsverzeichnis
15 Datenübertragung
15.1
Schnittstellenadapter
Wir entschieden uns dafür
den zur C-Control passenden Programmieradapter zur Programmierung zu verwenden.
Andernfalls hätten wir das wesentlich teurere Applicationboard, bei dem eine
Schnittstelle zum Programmieren implementiert ist, anschaffen müssen.
Der Schnittstellen
Programmier-Adapter ist notwenig, um das Basic Programm zur C-Control zu
übertragen. Eigentlich ist die Verbindung zum PC nur notwendig, um das Programm
zu übertragen. Jedoch entschieden wir uns dafür, diese Schnittstelle auch für
unsere externe Visualisierung zu nutzen, um die aufgenommenen Werte zum
Computer zu übertragen.
Inhaltsverzeichnis
15.2
Serielle Schnittstelle
Die serielle Schnittstelle
(COM-Port), oder auch RS232 genannt, besitzt einen 9 poligen Anschluss.
Um definierte Signalzustände
zu erreichen, sind hierzu Spannungsbereiche angegeben:
·
Low Zustand:
Spannungen von +1,0V bis -12V
·
High Zustand:
Spannungen von +1,25V bis +12V
Diese Signalzustände sind
somit TTL kompatibel 0V (low) und 5V (high).
Jedoch arbeiten einige PC´s meistens
Laptops mit Schaltschwellen von -3V (low Pegel) und +3V (high Pegel).
Alle Ausgänge an der
seriellen Schnittstelle sind Kurzschlussfest und können 10-20mA liefern.
Rot = Ausgang
Gelb = Eingang
Grün = Masse
Pin Ein-/Ausgang Bezeichnung Funktion
1 Ein DCD
(Data Terminal Ready) Empfangssignalpegel
2 Ein RxD
(Receive Data) Empfangsdaten
3 Aus TxD
(Transmit Data) Sendedaten
4 Aus DTR
(Data Terminat Ready) Endgerät
bereit
5 - GND
(Ground) Betriebserde
6 Ein DSR
(Data Set Ready) Betriebsbereitschaft
7 Aus RTS
(Request To Send) Sendeteil
einschalten
8 Ein CTS
(Clear To Send) Sendebereitschaft
9 Ein RI
(Rind Indicator) Ankommender
Ruf
15.3
Ansprechen
Port.dll:
Um unter Windows die
serielle Schnittstelle ansprechen zu können, sind seit Windows 2000 spezielle
Treiber erforderlich.
Dies geht mit kostenlosen
DLL´s (Dynamic Link Library, eine Windows-Funktionsbibliothek) die für solche
Anwendungen programmiert wurden.
Wir verwenden die port.dll.
Diese DLL muss ins Systemverzeichnis alternativ ins Programmverzeichnis des
jeweiligen EXE-Programms kopiert werden.
Portinc:
Portinc ist eine Unit,
welche ins Delphi Programm eingebunden werden muss. Diese beinhalten alle
notwendigen Deklarationen zur Port.DLL.
Diese Unit muss mit in das
Programmverzeichnis kopiert werden und in Delphi aufgerufen werden.
Auszug vom Quelltext
interface
uses
Windows, Messages, SysUtils, Variants,
Classes, Graphics, Controls, Forms,
Dialogs, StdCtrls, portinc, ExtCtrls;
type
Um nun die Datenbytes
empfangen zu können, wird mit „OpenCom“ der COM-Port geöffnet.
Dann wird der COM Anschluss
mit den entsprechenden Parametern deklariert.
COM 1,2,3, …
Bautraten: 1200,
2400, 4800, 7200, 9600, 14400, 19200, 28800, 38400, 57600 (Bits/Minute)
Databits: 7 oder 8 Datenbits
Parität N = none =
keine
E = even = gerade
O = odd = ungerade
Stopbit: 1 oder 2
Auszug vom Quelltext
////////////////////////////////////////////////////////////////////////////////
//////////////////////////// COMport Abfrage
//////////////////////
////////////////////////////////////////////////////////////////////////////////
OpenCom(pchar('COM2:
baut=9600 data=8 Parity=N stop=1'));.
Inhaltsverzeichnis
16 Software
16.1 Delphi
Systematische
Programmentwicklungen
16.1.1
Problemanalyse
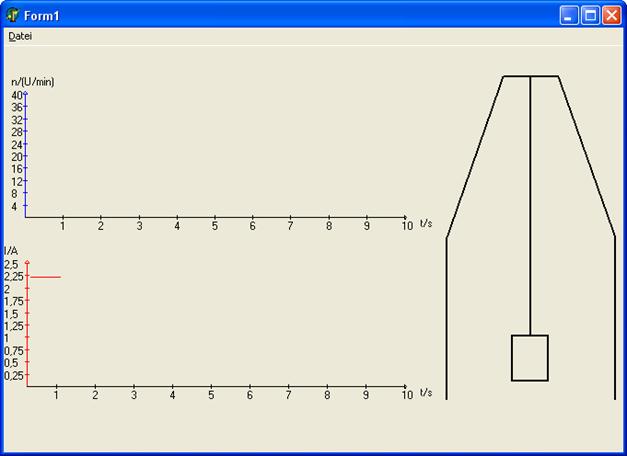
Es soll ein Programm
entwickelt werden, mit dem der Motorstrom in einem I/t-Diagramm und die
Drehzahl in einem zweiten n/t-Diagramm dargestellt wird. Zudem soll die
momentane Lage der Last in einer entsprechenden Grafik visualisiert werden.
16.1.2
Aufbau eines Lösungswegs
16.1.3
Datenanalyse
Name Typ Funktion
Wert_Ein_Frequenz Byte Frequenzwert
von C-Control
Wert_Ein_Strom Byte Strom von C-Control
Wert_Ein_Fahren Byte Drehzalhwert von C-Control
I Integer Hauptschleife Variable,
Stop
Strom Real Merker nach Umrechnung
Drehzahl Real Merker nach
Umrechnung
Drehzahl1 Real Merker nach
Umrechnung
n Integer Beschriftung Y-Achse
m Integer Beschriftung X-Achse
j Integer Teil Endbedingung Schleife
k Integer Durchlaufvariable
Diagramme
r String Text-Out Y-Achse Strom
s String Text-Out X-Achse Zeit
t String Text-Out-Y-Achse
Drehzahl
v Real Geschwindigkeit
v1 Integer Merker Geschwindigkeit
vw Integer Paketlage Obenkante
vx Integer Paketlage Untenkante
m_hoch Real Gewicht hochfahren
m_runter Real Gewicht runterfahren
16.1.4
Auswahl einer Zielsprache
Da die Zeit begrenzt ist,
und somit das lernen einer ganz neuen Programmiersprache zu viel Zeit in Anspruch
nehmen würde, werde wir diese Aufgabe mit Delphi realisieren.
16.1.5
Kodierung
Ist im Anhang hinterleget
16.1.6 Test
Semantische Fehler ausschließen
Alle Eigenschaften die der Kunde wünscht überprüfen
16.1.7
Dokumentation
Die Bedienungsanleitung ist
für die Komplette Erweiterung im Anhang hinterlegt.
Inhaltsverzeichnis
16.2 C-Control
16.2.1
Allgemeines
Die Programmierung der
C-Control M-Unit 2.0 wurde mit der mitgelieferten Software Basic++2006 vorgenommen.
Damit die C-Control weiß was
sie zu tun hat, benötigt sie bestimmte Befehle. Bei der C-Control werden so
genannte Tokens verarbeitet (keine Maschinenbefehle).Diese Tokens werden von
Basic++2006 erzeugt und können von dem fest implementierten Betriebssystem der
C-Control ausgeführt werden. Oft liest man auch, dass diese Tokens vom
Betriebssystem interpretiert würden. Deshalb wird dieses System auch oft als
Interpreter bezeichnet.
16.2.2 Verarbeitung in der C-Control
Wir nutzen die C-Control größten
Teils dazu, Werte aufzunehmen und dann über die serielle Schnittstelle zur
Weiterverarbeitung an einen dort angeschlossenen PC weiterzuleiten.
So wird das Ausgangssignal
unserer Schaltung mit dem Strommess-IC lediglich über einen AD-Port eingelesen
und ohne damit zu rechnen oder sonstige Verarbeitungen daran vorzunehmen über
die serielle Schnittstelle zum PC weitergegeben.
Die gleiche Methode
verwenden wir bei der Drehzahl. Hierbei wird das Ausgangssignal der
Gabellichtschranke mit Hilfe des Frequenzeinganges eingelesen und
weitergegeben.
Im Gegensatz dazu wird der
Zustand der Anlage (Tasterzustände) im Controller verarbeitet und dann
weitergesendet.
Außerdem geben wir einige
aufgenommene Werte in verarbeiteter Form sofort über ein, an den digitalen I /
O-Ports angeschlossenes Display aus. (Zustand der Anlage und Drehzahl)
Inhaltsverzeichnis
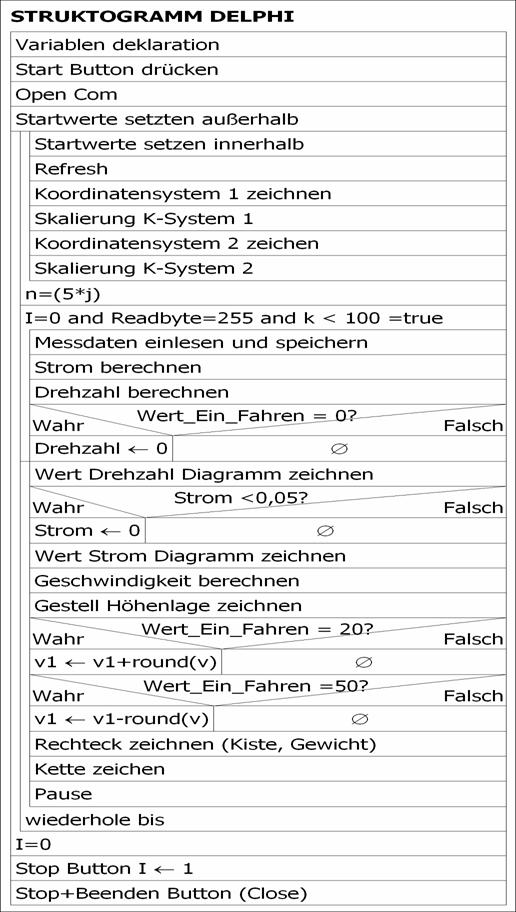
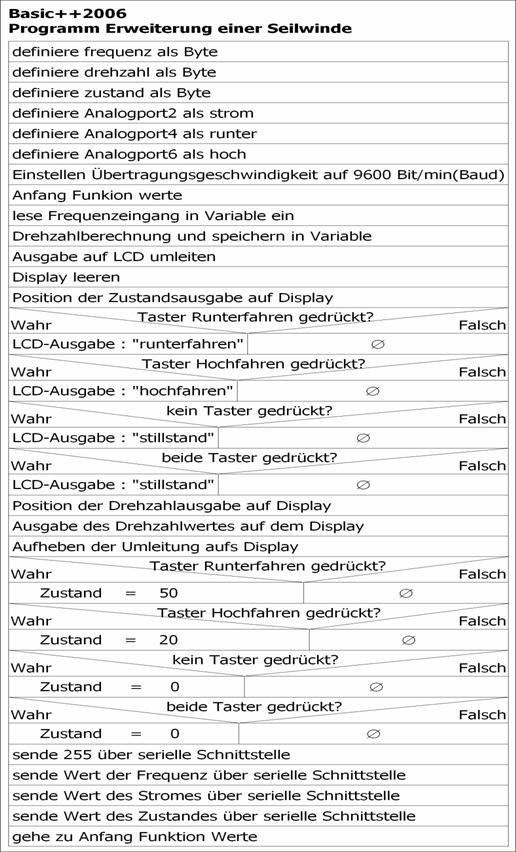
16.2.3 Struktogramm
16.2.4 Variablentabelle
|
Bezeichnung
|
Typ
|
Aufgabe
|
|
frequenz
|
Byte
|
Variable für eingelesene
Frequenz
|
|
drehzahl
|
Byte
|
Variable für berechnete
Drehzahl
|
|
zustand
|
Byte
|
Variable für Übermittlung
der Tasterzustände
|
|
strom
|
Byte
|
Variable für eingelesenen
Strom
|
|
runter
|
Byte
|
Variable für Tasterzustand
(Taster Runterfahren)
|
|
hoch
|
Byte
|
Variable für Tasterzustand
(Taster Hochfahren)
|
Inhaltsverzeichnis
16.2.5 Quelltext
Basic++2006
define frequenz as byte 'definiere frequenz als Byte
define drehzahl as byte 'definiere drehzahl als Byte
define zustand as byte 'definiere zustand als Byte
define strom
as ad[2] 'definiere Analogport2 als strom
define
runter as ad[4] 'definiere Analogport4 als runter
define hoch
as ad[6] 'definiere Analogport6 als hoch
baud r9600 'Baudrate auf 9600 eingestellt
#werte 'Funktion werte
frequenz=FREQ 'Frequenzeingang1 in Variable frequenz schreiben
drehzahl = (frequenz * 60 / 120) 'Berechnung von Frequenz in Drehzahl
LCD.INIT 'Initialisieren des LCD Objektes ( print-Ausgabe auf LCD
umleiten)
LCD.CLEAR 'Display leeren
LCD.POS 1,1 'Zeile1, Spalte1
if (runter
< 200) and (hoch > 200)then lcd.print "runterfahren" 'Taster(runter)
gedrückt Taster(hoch) nicht Ausgabe: runterfahren
if (hoch
< 200)and (runter > 200) then lcd.print "hochfahren" 'Taster(hoch)
gedrückt Taster(runter) nicht Ausgabe: hochfahren
if (hoch
> 200)and (runter > 200) then lcd.print "stillstand" 'kein Taster
gedrückt Ausgabe: Stillstand
if (hoch
< 200)and (runter< 200 ) then lcd.print "stillstand" 'beide Taster
gedrückt Ausgabe: Stillstand
LCD.POS 2,1 'Zeile2, Spalte2
LCD.PRINT
"Drehzahl: " & drehzahl & " rpm " 'Ausgabe der errechneten Drehzahl in rpm
LCD.OFF 'Aufheben der Umleitung aufs LC-Display
if (runter
< 200) and (hoch > 200) then zustand=50 'Taster(runter)
gedrückt Taster(hoch) nicht setze zustand=50
if (hoch
< 200)and (runter > 200) then zustand=20 'Taster(hoch)
gedrückt Taster(runter) nicht setze zustand=20
if (hoch
> 200)and (runter > 200) then zustand=0 'kein Taster
gedrückt Ausgabe: Stillstand setze zustand=0
if (hoch
< 200)and (runter< 200 ) then zustand=0 'beide Taster
gedrückt Ausgabe: Stillstand setze zustand=0
put 255 'sende die Zahl 255 über die serielle Schnittstelle
put frequenz 'sende den Wert der Variable über die serielle Schnittstelle
put strom 'sende den Wert der Variable über die serielle Schnittstelle
put zustand 'sende den Wert der Variable über die serielle Schnittstelle
goto werte 'gehe zur Funktion werte
Erklärung der Drehzahlrechnung

Inhaltsverzeichnis
17 Testprotokol der Erweiterungen
17.1 Testen
der Drehzahlaufnahme
Hierbei wurden die
verschiedenen Drehzahlen, die wie in Kapitel 5.4 beschrieben, aufgenommen
wurden, mit den visualisierten Ergebnissen verglichen.
|
|
|
Vor den Umbaumaßnahmen ermittelt
|
|
|
|
Hochfahren
|
Runterfahren
|
|
Flaschen
|
Masse/kg
|
Drehzahl in 1/min
|
Drehzahl in 1/min
|
|
2
|
4,3
|
31,17
|
33,90
|
|
4
|
6,6
|
31,01
|
34,61
|
|
6
|
8,9
|
30,19
|
34,72
|
|
8
|
11,1
|
29,43
|
34,94
|
|
10
|
13,4
|
28,61
|
35,05
|
|
12
|
15,6
|
28,17
|
35,10
|
|
|
|
|
|
|
Delphi (externe Visualisierung)
|
Display (interne Visualisierung)
|
|
Hochfahren
|
Runterfahren
|
Hochfahren
|
Runterfahren
|
|
Drehzahl in 1/min
|
Drehzahl in 1/min
|
Drehzahl in 1/min
|
Drehzahl in 1/min
|
|
ca. 30
|
ca. 32
|
ca. 30
|
ca. 32
|
|
ca. 30
|
ca. 33
|
ca. 30
|
ca. 33
|
|
ca. 29
|
ca. 33
|
ca. 29
|
ca. 33
|
|
ca. 28
|
ca. 33
|
ca. 28
|
ca. 33
|
|
ca. 28
|
ca. 33
|
ca. 28
|
ca. 33
|
|
ca. 27
|
ca. 34
|
ca. 27
|
ca. 34
|
Die leichten Abweichungen
sind durch die Ungenauigkeiten bei der Aufnahme der Werte zu Beginn des
Projektes (Kapitel 5.4) zu begründen. (Stoppuhr, Abweichungen bei der Strecke)
17.2 Testen
der Stromaufnahme
Beim Testen der Stromaufnahme
gingen wir genauso wie beim Testen der Drehzahlaufnahme vor. Es wurden die
Werte aus Kapitel 5.3 mit den Werten in unserer Visualisierungssoftware
(externe Visualisierung) verglichen.
|
|
|
Vor den Umbaumaßnahmen ermittelt
|
|
|
|
Hochfahren
|
Runterfahren
|
|
Flaschen
|
Masse/kg
|
Strom in A
|
Strom in A
|
|
2
|
4,3
|
0,555
|
0,260
|
|
4
|
6,6
|
0,655
|
0,225
|
|
6
|
8,9
|
0,750
|
0,185
|
|
8
|
11,1
|
0,855
|
0,155
|
|
10
|
13,4
|
0,950
|
0,140
|
|
12
|
15,6
|
1,080
|
0,105
|
|
|
|
|
|
|
Delphi (externe Visualisierung)
|
|
|
|
Hochfahren
|
Runterfahren
|
|
|
|
Strom in A
|
Strom in A
|
|
|
|
ca.0,5
|
ca.0,2
|
|
|
|
ca.0,6
|
ca.0,2
|
|
|
|
ca.0,7
|
ca.0,2
|
|
|
|
ca.0,8
|
ca.0,1
|
|
|
|
ca.0,9
|
ca.0,1
|
|
|
|
ca.1,0
|
ca.0,1
|
|
|
17.3 Testen
der Zustandsanzeige
Beim Testen der
Zustandsanzeige wurden nacheinander die einzelnen Taster betätigt und dann
beobachtet, welcher Text auf unserem Display ausgegeben wird.
Hierzu erstellten wir
folgende Tabelle:
|
Taster Hoch
|
Taster Runter
|
Textausgabe Display
|
|
betätigt
|
nicht betätigt
|
betätigt
|
nicht betätigt
|
|
|
X
|
|
|
X
|
"hochfahren"
|
|
|
X
|
X
|
|
"runterfahren"
|
|
X
|
|
X
|
|
"stillstand"
|
|
|
X
|
|
X
|
"stillstand"
|
17.4 Testen
der Lagebestimmung
Hierbei wurde lediglich eine
Sichtprüfung durchgeführt. Es wurde untersucht ob das Rechteck das als
Simulation der Last auf unserem Bildschirm zu sehen ist sich in die gleiche
Bewegung versetzt wie die wirkliche Last.
|
Zustand der Last
|
Zustand der simulierten Last
|
|
Hochfahren
|
Runterfahren
|
Stillstand
|
Hochfahren
|
Runterfahren
|
Stillstand
|
|
X
|
|
|
X
|
|
|
|
|
X
|
|
|
X
|
|
|
|
|
X
|
|
|
X
|
17.5
VDE-Prüfung
|
Prüfung
nach DIN 0100 Teil 610
|
|
|
|
|
|
|
|
Messung
|
Messwerte
|
Sollwert
|
iO
|
niO
|
|
Schutzleiterwiderstand
|
999MΩ
|
≥0,5Ω
|
√
|
|
|
Isolationswiderstand
|
0,01Ω
|
≤1Ω
|
√
|
|
|
Netzspannung
|
242V
|
230V ±10%
|
√
|
|
|
|
|
|
|
|
|
Einspeisung
Schaltschrank
|
|
|
Messung
|
Messpunkt 1
|
Messpunk 2
|
Prüfspannung
|
Messwert
|
|
1
|
L1
|
N
|
500V DC
|
>999MΩ
|
|
2
|
L1
|
PE
|
500V DC
|
>999MΩ
|
|
3
|
N
|
PE
|
500V DC
|
>999MΩ
|
|
|
|
|
|
|
|
Funktionsprüfung der
Anlage:
|
|
|
|
|
|
|
|
iO
|
niO
|
|
Not-Aus-Einrichtung
|
|
√
|
|
|
Netzausfall (Wiederkehrende Spannung)
|
|
√
|
|
|
Drahtbruch-Sicherheit
|
|
√
|
|
|
Geerdeter Steuerstromkreis
|
|
√
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Verwendetet Messgeräte:
|
|
|
|
|
Fabrikat:
|
Voltcraft
|
Typ:
|
VC820
|
|
|
Fabrikat:
|
Amprobe
|
Typ:
|
Genius 5035
|
|
Inhaltsverzeichnis
18 Drehzahlsteller
Nachdem soweit alle Arbeiten
abgeschlossen waren, ist uns aufgefallen, dass in der bereits vorhandenen
Dokumentation ein Drehzahlsteller eingezeichnet ist.
Dieser ist an der
Klemmleiste (R1) gezeichnet.
Nach kurzer Rücksprache mit
dem Ausbilder, sind wir darauf aufmerksam gemacht worden, dass bereits ein
Drehzahlsteller als Bausatz zur Erweiterung der Seilwinde angeschafft wurde.
Nach kurzem einlesen in die
Unterlagen, entschieden wir uns dafür, den Bausatz nach beiliegender Anleitung
zu löten.
Dieser Drehzahlsteller
arbeitet nach dem Prinzip der Puls Weiten Modulation (PWM).
Der Drehzahlsteller besitzt
neben einer Strombegrenzung die Möglichkeit die Frequenz der ausgegebenen
Spannung zu verändern und zusätzlich noch eine Puls Weiten Modulation (PWM) durchzuführen.
Durch diese Einstellmöglichkeiten kann die Drehzahl verändert werden.
Zum Ende des Projektes
stand uns leider nicht mehr genügend Zeit zur Verfügung den Drehzahlsteller in
Betrieb zu nehmen.
Da aber für spätere
Erweiterung eine gewisse Reserve in dem Installationskasten eingeplant wurde,
dürfte es kein Problem sein, den Drehzahlsteller durch verlegen einiger
Leitungen und anderen kleinen Änderungen in die Anlage zu implementieren.
Inhaltsverzeichnis
19 Projektverlauf (Fazit)
Zu Beginn des Projektes lief
alles wie geplant und genau nach dem festgelegten Zeitplan. Wir konnten uns
während der Planungsphase relativ schnell darauf einigen, welche Bauteile
eingesetzt werden. Wie von uns geplant, konnten die Bauteile dann auch zeitnah
bestellt werden.
Erste Probleme tauchten dann
auf als wir die Lieferungen der Komponenten erhielten. Erst dann bemerkten wir,
dass wir bei unserer Zeitplanung vergessen hatten zu berücksichtigen, dass wir
für die verschiedenen Bauteile auch verschiedene Spannungsversorgungen benötigen.
Aus diesem Grund wurde dann auch wie in der Dokumentation unter Kapitel 4
beschrieben der Zeitplan abgeändert.
Durch diese Änderung hatten
wir natürlich auch einige Probleme die Zeitplanung genau einzuhalten. Dies
merkten wir dann im weiteren Verlauf des Projektes daran, dass wir die
einzelnen Meilensteine, wie „Mikrocontroller programmiert“ oder „Arbeiten
abgeschlossen“ nicht zu den angegebenen Kalenderwochen erreichen konnten.
Außerdem ist noch
anzumerken, dass wir, wenn man die komplette Durchführung des Projektes
betrachtet, mit der von uns eingeplanten Zeit, zu keinem, zufriedenstellenden
Ergebnis gekommen wären.
Durch das Nutzen der Ferien
und der, durch die Schule, zur Verfügung gestellten Projektwoche konnten die
von uns gesteckten Ziele dann doch erreicht werden.
Zum Schluss ist zu sagen,
dass wir größten Teils mit dem Ablauf des Projektes zufrieden sind, jedoch
hätte man einige Sachen anders machen können.
Was hätte man besser machen
können?
- Für die Planungsphase hätten wir weniger Zeit einplanen
können
- Vor dem Projekt mehr auf Probleme, die entstehen
können, eingehen.
(z.B. Spannungsversorgung)
- Mehr Pufferzeit beim Einbau und dem Testen der
Bauteile einplanen
- Eventuelle Lieferschwierigkeiten einplanen
- Mehr Alternativen in der Planungsphase suchen,
um schneller auf Probleme reagieren zu können ( Probleme bei der
Gewichtsbestimmung)
Inhaltsverzeichnis
20 Erklärung
Hiermit erklären wir, dass
alle in der Projektdokumentation ausgeführten Ergebnisse, auf von uns
eigenständig durchgeführte Arbeiten zurückzuführen sind.
---------------------------------- ------------------------------------------
Unterschrift Jan Schmitz Unterschrift Christian
Gödderz
Inhaltsverzeichnis
21 Abbildungsverzeichnis
Abb.: 1 Bestehende Seilwinde der
ILW-Koblenz. 2
Abb.: 2 Motor, Welle und Bremse. 3
Abb.: 3 unterschiedliche Massen. 14
Abb.: 4 Anschluss Motor 15
Abb.: 5 Kenndaten der Firma DOGA. 15
Abb.: 6 I/M-Kennlinie (2) 15
Abb.: 7 n/M-Kennline (2) 15
Abb.: 8 Aufbau Stommess IC CMS2000. 23
Abb.: 9 Schaltplan zum Messaufbau. 24
Abb.: 10 Messaufbau Stommess IC. 24
Abb.: 11 Anschlussbelegung Stormmess
IC. 25
Abb.: 12 OP-Schaltung
Messbereichserweiterung. 27
Abb.: 13 Ausgang Strommess IC. 28
Abb.: 14 Ausgang Strommess IC ohne
Verstärkung. 28
Abb.: 15 Blockschaltbild Strommessung. 29
Abb.: 16 Funktionsprinzip
photoelektrische Abtastung. 30
Abb.: 17 Gabellichtschranke mit
Taktscheibe. 31
Abb.: 18 Ausgangssignalform
Gabellichtschranke. 31
Abb.: 19 Sharp GP1A15. 32
Abb.: 20 Relais um Tastersignale
aufzunehmen. 32
Abb.: 21 Anschlussplan Relais. 32
Abb.: 22 Bolckschaltbild
Drehzahlaufnahme. 34
Abb.: 24 Bedieneinheit Tastersignale. 38
Abb.: 25 Verschiedene C-Control
Ausführungen. 39
Abb.: 26 Anschlussbelegung C-Control 41
Abb.: 27 Spannungsversorgungsplatine
X1. 43
Abb.: 28 Platinenlayout
Spannungsversorgung. 45
Abb.: 29 Messaufbau
Spannungsversorgung. 47
Abb.: 30 Messung 5V (C-Control
/Gabellichtschranke) 48
Abb.: 31 Messung 1,2V (Diode
/Gabellichtschranke) 48
Abb.: 32 Messung +12V (Strommess-IC) 48
Abb.: 33 Messung -12V (Strommess-IC) 48
Abb.: 34 Einbauort Taktscheibe. 51
Abb.: 35 Einbauort Gabellichtschranke. 51
Abb.: 36 Serielle Schnittstelle,
Start-Jumper 51
Abb.: 37 Verarbeitsungsplatine X2. 52
Abb.: 38 Erweiterung der Seilwinde im
Installationskasten. 52
Abb.: 39Gesamtes Blockschaltbild. 54
Abb.: 40 LC-Display. 55
Abb.: 41 Pinbelegung Dispaly. 55
Abb.: 42 Jumperbelegung Programmieradapter 57
Abb.: 43 Belegung COM-Stecker 58
Abb.: 44 Delphi Oberfläsche. 60
22 Quellen
22.1
Internet
http://www2.produktinfo.conrad.com/datenblaetter/125000-149999/128799-an-01-de-C_Control_Station_II.pdf
27.05.2007
http://www2.produktinfo.conrad.com/datenblaetter/125000-149999/128799-sp-01-en-C_Control_Station_II.pdf
27.05.07
http://www2.produktinfo.conrad.com/datenblaetter/175000-199999/198302-an-01-ml-C-Control_1_Micro_Programmer_de-en.pdf
09.08.2007
Delphi
http://www.b-kainka.de/referenz.txt
http://www.wut.de/pdf/e-57w11-ww-prde-000.pdf
http://www.delphi-treff.de/
http://www.delphipraxis.net/topic94631.html
Strommessung
http://sensitec.de.p-ad.de/index.php?s=3,1,0&p=25
Mikrocontroller
http://www.b-kainka.de/kosmos/micro1.htm#zusatz
http://www.shop.robotikhardware.de/shop/catalog/product_info.php?products_id=29
http://www.shop.robotikhardware.de/shop/catalog/index.php?cPath=64&osCsid=1d42204ff1df8c6067614a82ead6737a
Drehzahlmessung
http://www.omron-industrial.com/de_de/home/products/sensing/FiberOpticSensors/FiberOpticAmpl/default.asp
http://www.krause-robotik.de/produkte/sensoren/drehzahl.html
http://www.sm-modellbau.de/shop/product_info.php?products_id=22
http://www.ed-modellbau.de/product_info.php?pName=externer-optischer-drehzahlsensor&cName=sm-modellbauelektronik&osCsid=58c1f0bcc5160fadb88b1e61d967132a
http://www.shop.robotikhardware.de/shop/catalog/product_info.php?products_id=106
http://www.robotmaker.de/linie.html
http://www.vishay.com/optical-sensors/list/product-83751/
http://www.krause-robotik.de/Shop/index.htm
Bildschirm
http://images.mercateo.com/pdf/Schuricht/661364_de.pdf
http://www.mercateo.com/q?query=grafikdisplay&perpage=100
Strommess IC
http://www.sensitec.de/index.php?s=6,2,0
telefonische Anfrage
25.11.2007
Motor
http://www.eph-elektronik.de/produkte/doga_neu/doga_produkte.htm
Gewichtsbestimmung
http://www.drehmomentsensoren.com/frame/drehm.htm
http://www.hbm.de/products/SEURLF/ASP/SFS/SUBCAT.9/CATEGORY.1/PRODID.510/MM.3,18,25/SFE/technical.htm
22.2 Bücher
Programmieren mit Delphi;
Vieweg-Verlag; 2.Ausgabe
PC-Schnittstellen unter
Windows; Elektor-Verlag;
Messen, Steuern und Regeln
mit C-Control M-Unit 2, Franzis Verlag
22.3
Sonstiges
Abschlussprojekt FSE 05, Erweiterung
eines Motorprüfstands, Dokumentation zur Projektarbeit
Inhaltsverzeichnis